AU系列装机量大,厂家的手册资料非常齐全,而且近年来各种问题不断,细细分析起来,其实都是厂家的资料理解不够造成的。从去年底就开始考虑这个帖子,也是应同行的要求而作。
由于全手工打字,错误难免,也可能个人理解会有偏颇,欢迎指出。只要我有时间,还是乐意做这些工作的。
为了防止断楼,我先占楼到30楼,至于什么时候完工就不一定了,尽量在几天内完成。
准备性的资料:
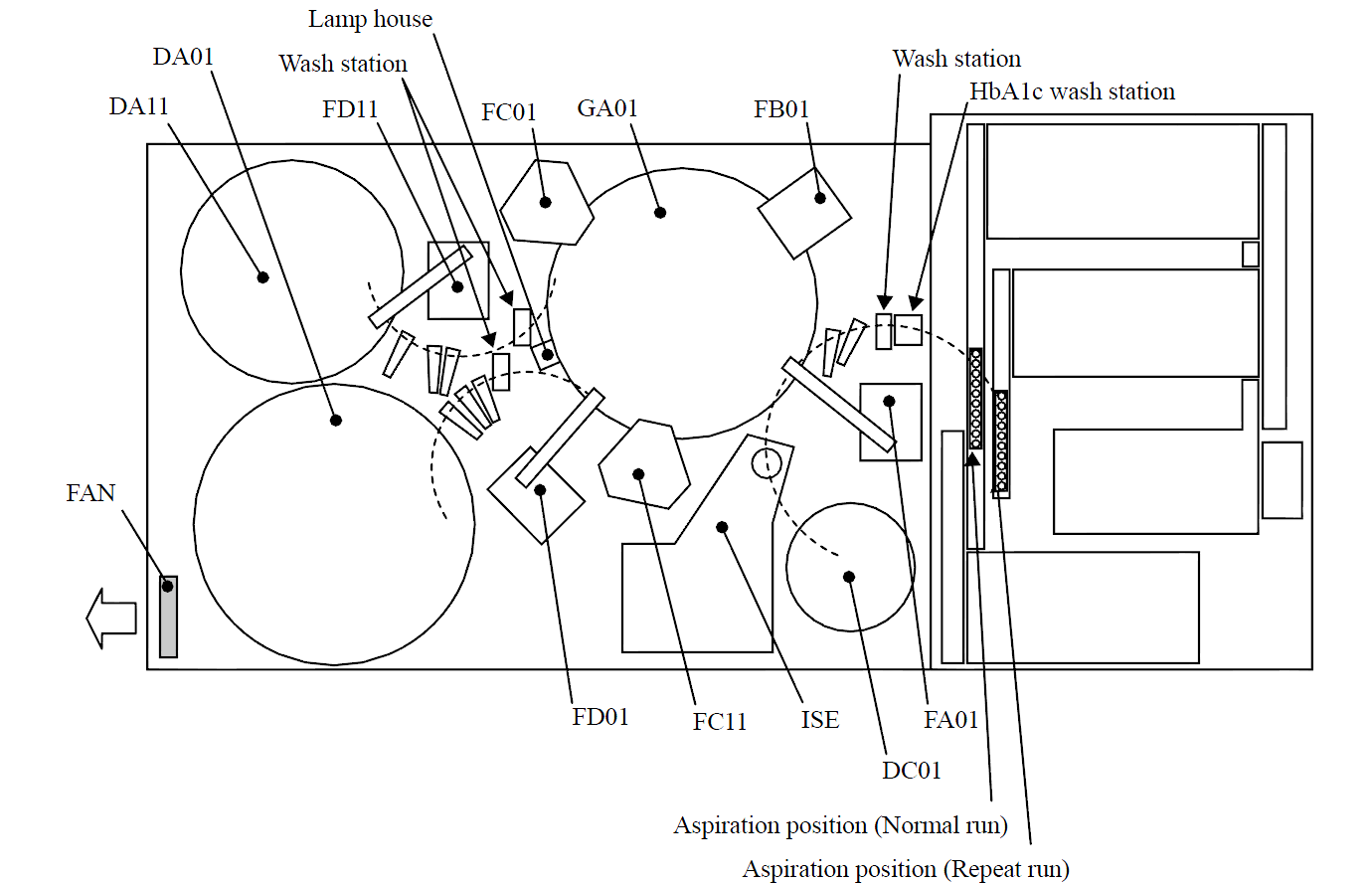
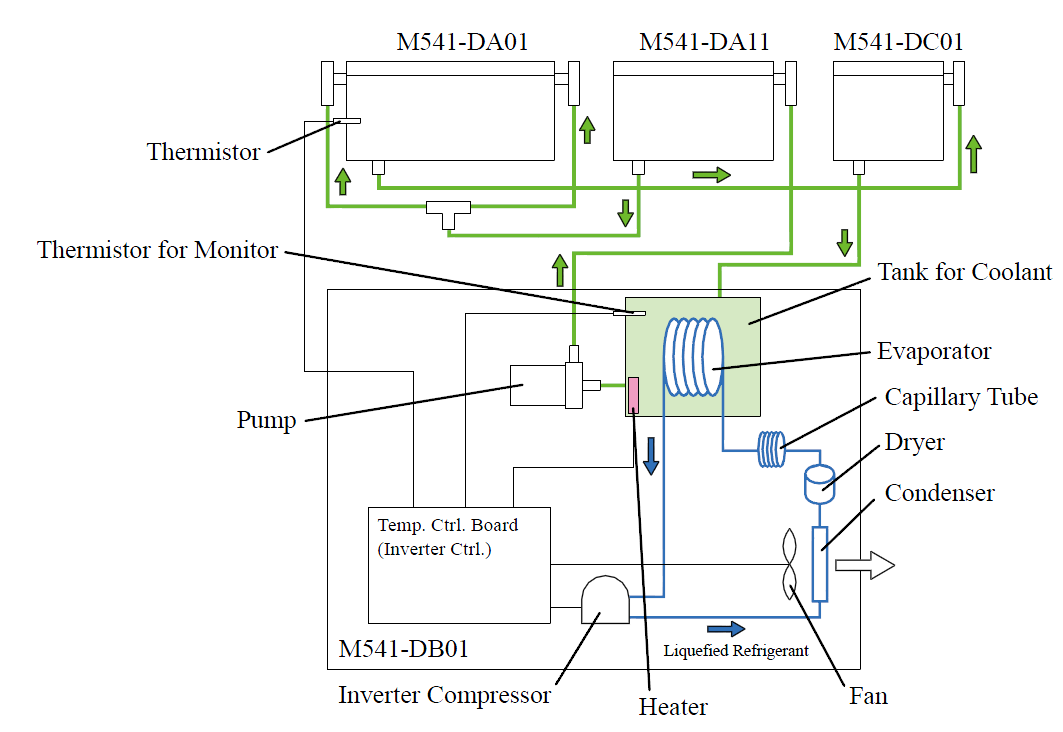
AU680的管路图,在后面会对应讲解具体的形状和位置,方便增加对管路图的理解:
 AU680管路图.pdf (474.03
KB, 下载次数: 1547) AU680管路图.pdf (474.03
KB, 下载次数: 1547)
AU680
ISE管路图.pdf (412.8
KB, 下载次数: 1105)
管路图有两个版本,新旧版本以机号S/N
0030473为界,之前的是旧版本,之后的为新版本,这里以新版本为例。
而Au系列的管路图单独详解请看以前发布的帖子:https://www.yeec.com/forum.php?mod=viewthread&tid=42752
除了管路图之外,还要知道仪器诊断菜单的用法:
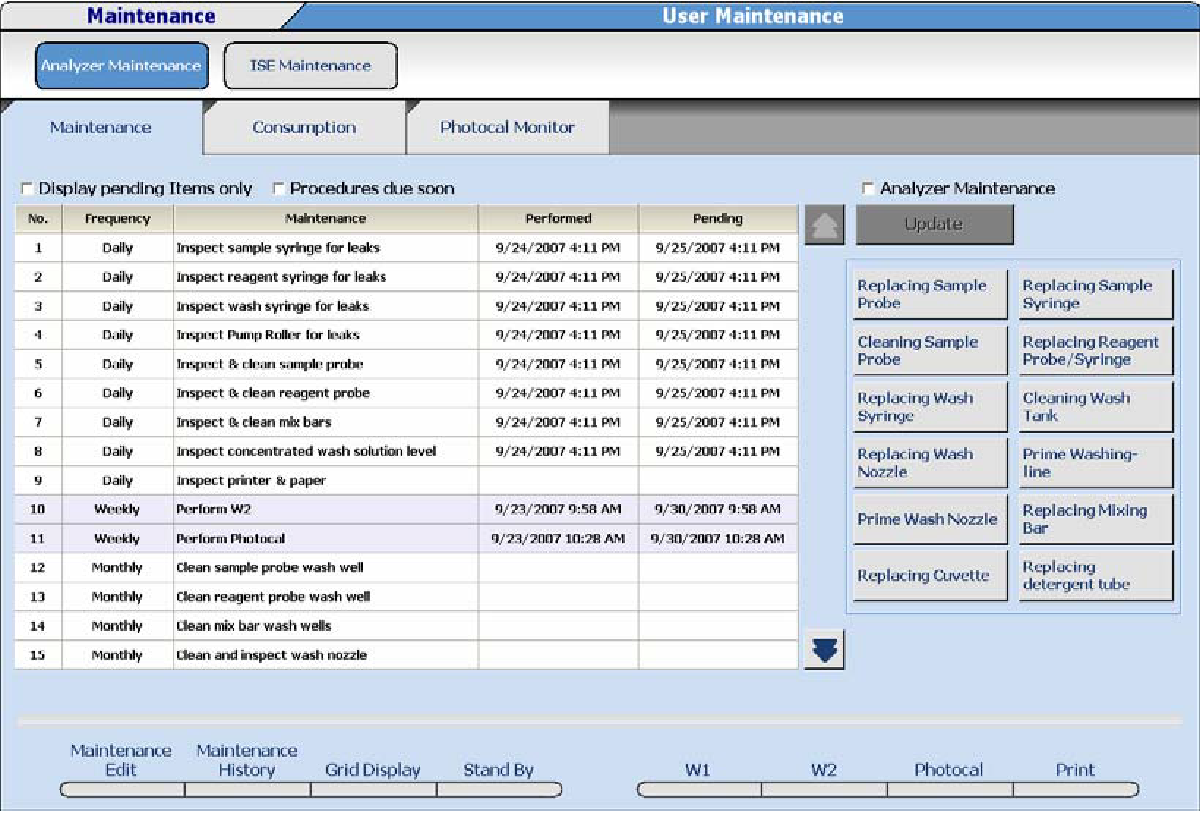
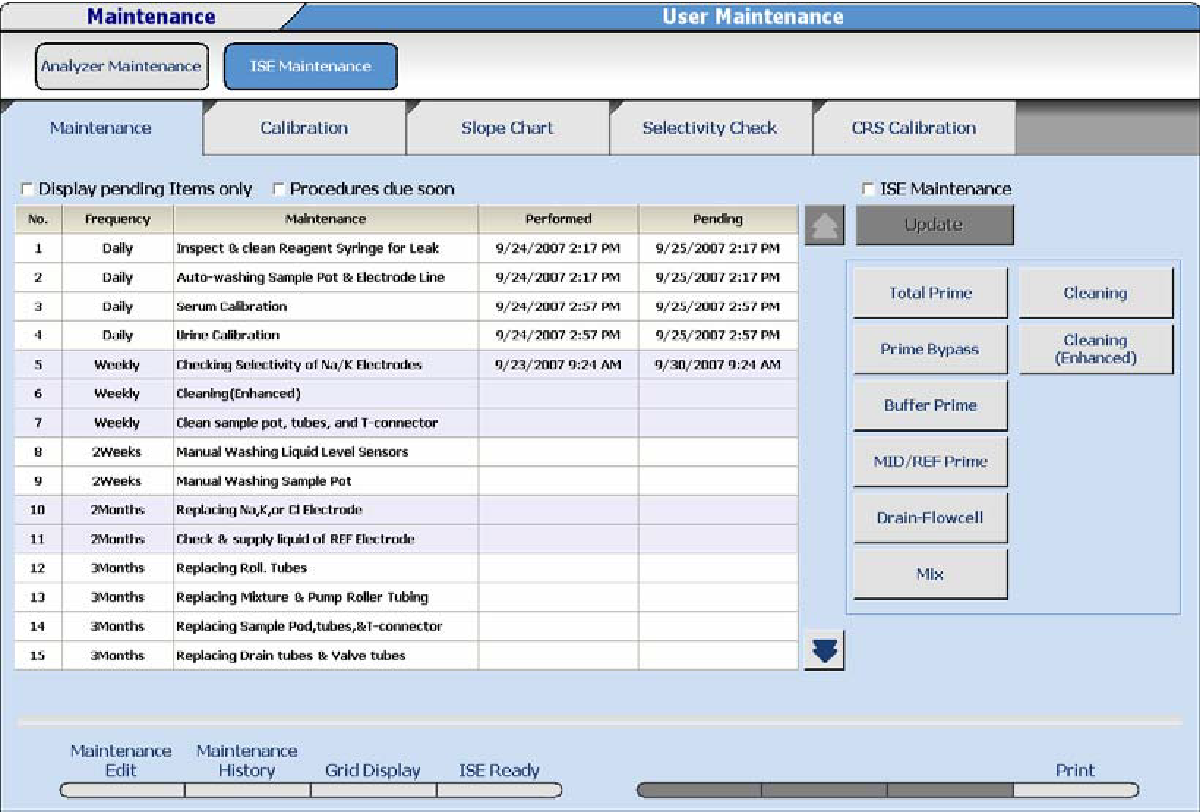
这是两张仪器维护菜单和ISE维护菜单的界面,大家经常用到,但调整不在这里,所以用不到这个。
而仪器机构的检查、调整用到的是诊断菜单,是下面这些界面,将逐一讲解。
诊断菜单分为两大部分,分析仪诊断Analyzer DIAG和ISE诊断ISE DIAG。
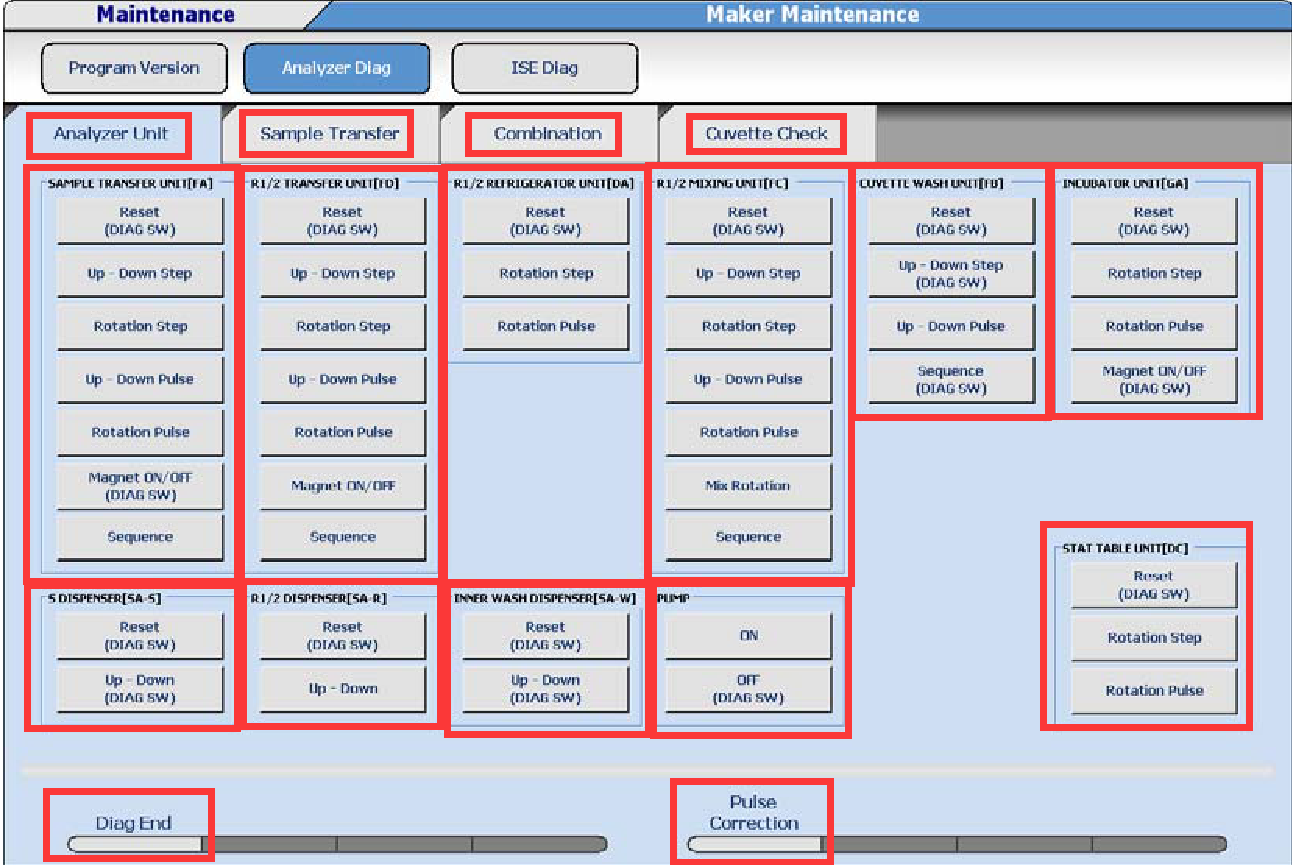
这是分析仪诊断Analyzer
DIAG的主界面,刚进入这个界面的时候,全面按钮都是灰色的,需要按左下角的DiagStart(现在已经进入了,所以是DiagEnd,就是退出诊断菜单的意思。),如果按下DiagStart无效,或者弹出提示菜单,就表示机器没有处于STOP状态,必须进入STOP状态才行,就是按最上面的停机按钮,等候一会儿,下面的提示栏出现STOP状态,再按DiagSTART,就会进入诊断菜单,所有按钮都生效。
这是分析仪诊断菜单里的四个页框中的第一个,分析仪单元Analyzer Unit。
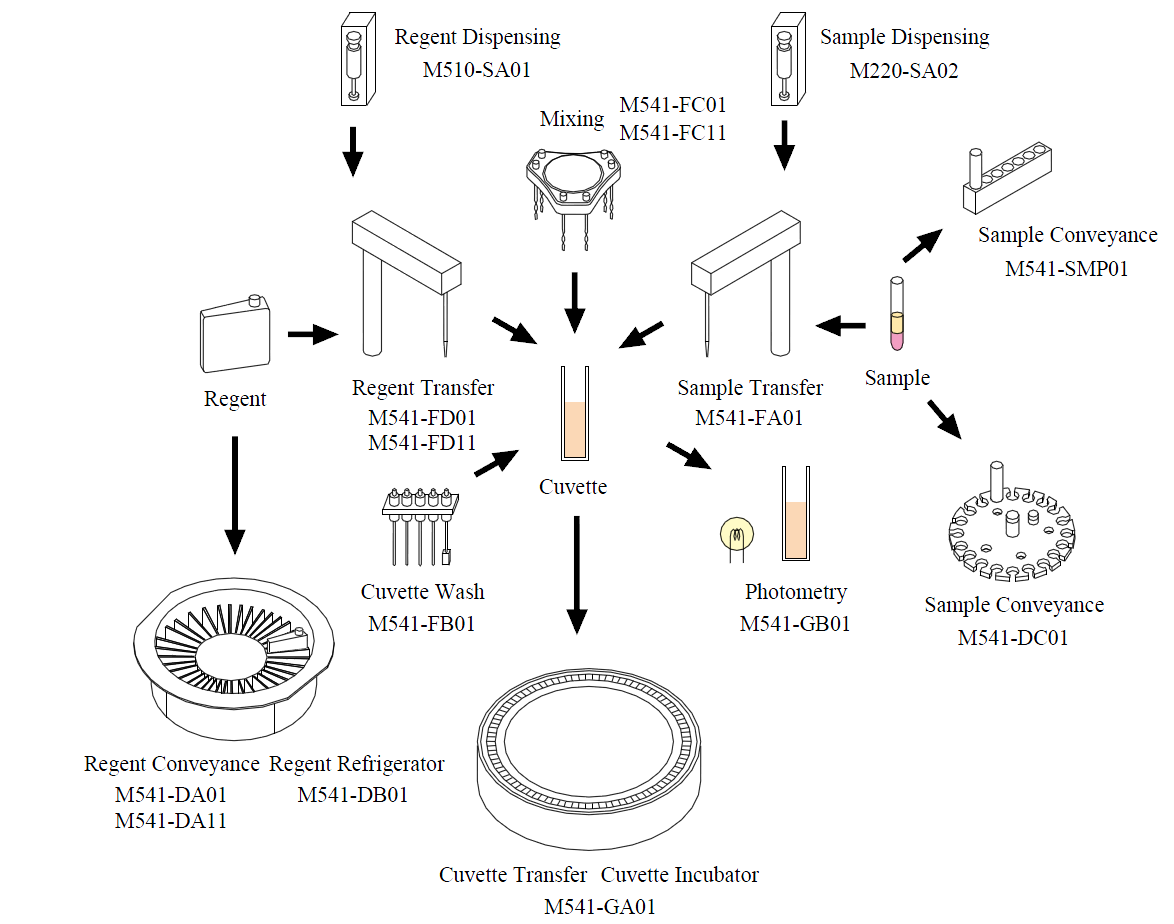
从左往右依次是FA样品针单元、FD试剂针单元(R1、R2),DA试剂盘单元(R1、R2)、FC搅拌单元、FD冲洗站单元、GA反应盘单元。
每个单元都有数量不等的按钮,比如Reset(Diag
SW),表示复位,这个单元恢复到初始位置。所有带有(Diag
SW)的提示,按下该按钮后仪器都不会直接动作,而是要到主机的面板上,在急诊盘附近的的DiagSW开关上按压才能动作,而且整个动作是依次循环的,按一次诊断开关,这个单元就按照选择动作一次,如果有多个动作,就会反复循环。
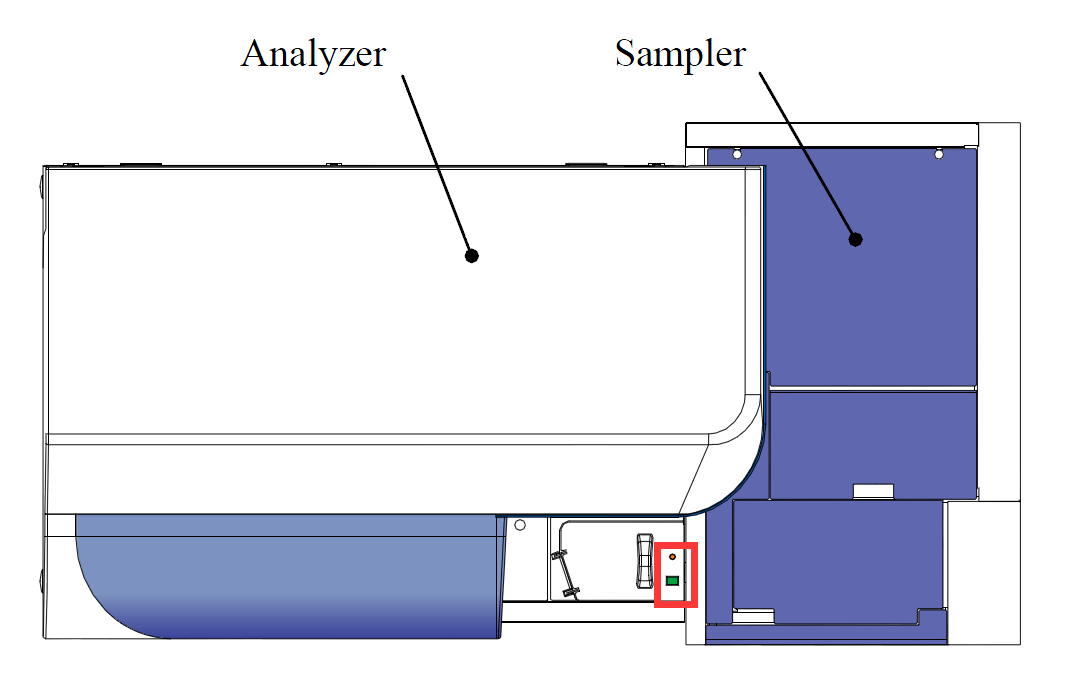
上图红色标记位置就是诊断开关(Diag SW)的位置。
除复位外,还有UP-DOWN STEP
上下步骤动作(如果该单元有上下功能的话,每次按压诊断开关,会从上到下或相反的运动一个完整的流程);UP-DOWN
PULSE上下步进动作(每次按一下诊断开关,会上下移动一个步进);Rotation
setp或PULSE,旋转摆动流程或步进动作;magnet
on/off表示解除电磁锁定或开启电磁锁定,因为在实际操作中,手工是无法移动任何单元的,因为步进马达被锁死,如果需要手工移动检查,就要先解除电磁锁定。sequence是指这个单元完整的进行一次各个位置的上下及摆动测试流程。
下一行依次是S-SA样品注射器、R1/2
SA试剂注射器、SA-W样品针外壁清洗注射器的复位和上下动作操作。Pump是负压泵和废液泵的打开和关闭操作。最后是STAT急诊盘的复位、旋转流程及旋转步进的操作。
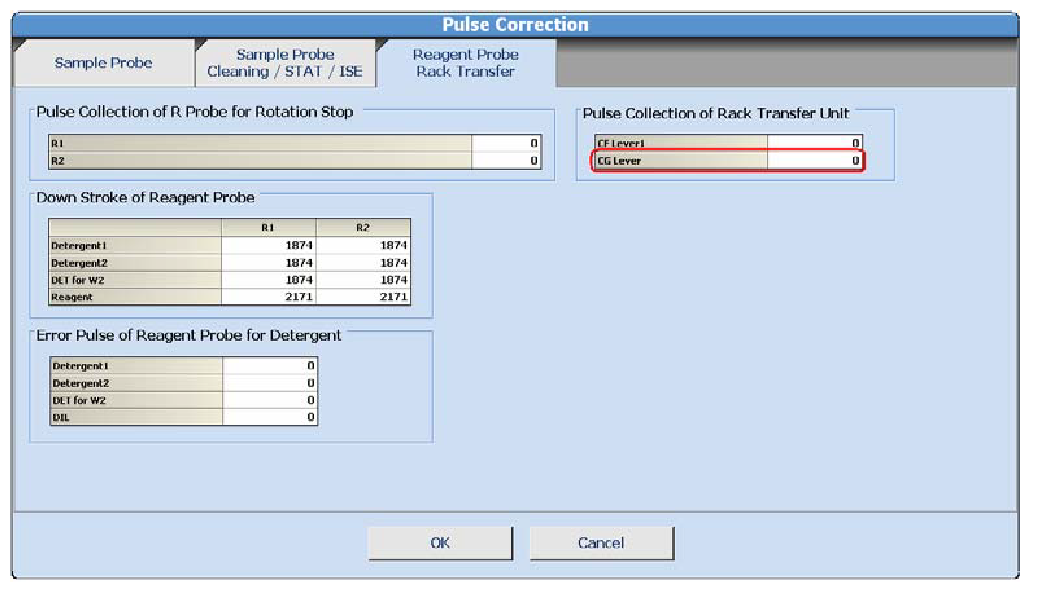
诊断测试调整完毕,按左下角的DIAGEND退出。右下角有个PULSE
correction 是步进数的调整,后面会有介绍。
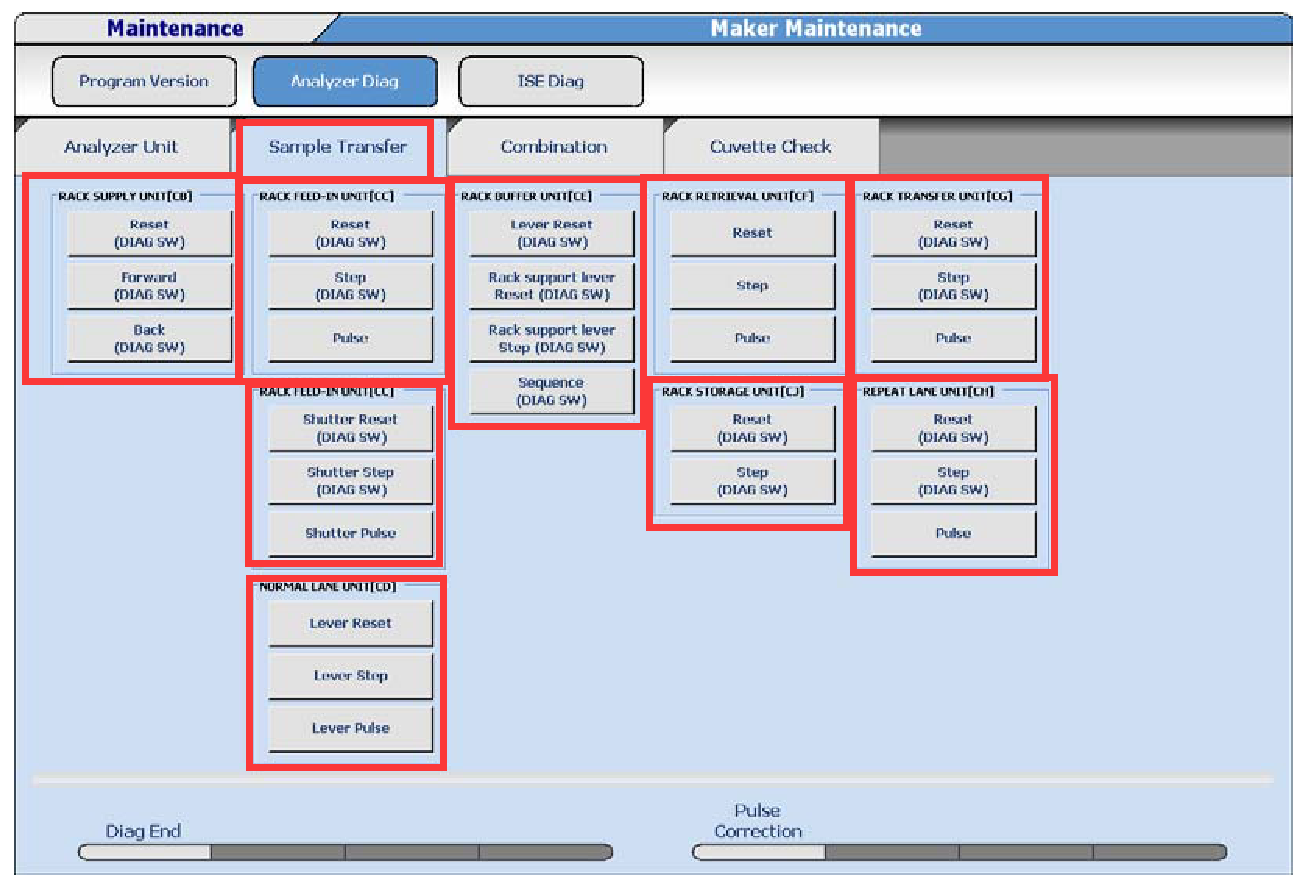
这是分析仪诊断的第二个菜单,Sample
Transfer进样器传送,也就是轨道部分的检查和调整使用的。
整个轨道进样器部分AU称为CA单元,CB是指进样器的样品架装载单元,CC是架步进单元,CD是加样轨,CE是缓冲轨,CF是检索轨也就是等待测试结果出来,进一步判断是否重测还是结束测试。CG是重测传送轨、CH是重测轨、CJ是卸载轨。每个单元都有复位、运动流程、步进、前进后退等检查按钮。
CC单元多了一个单元,就是SHUTTER快门机构的检测,这个装置是个保护装置,防止采样针滴落液体到其它样品试管里。
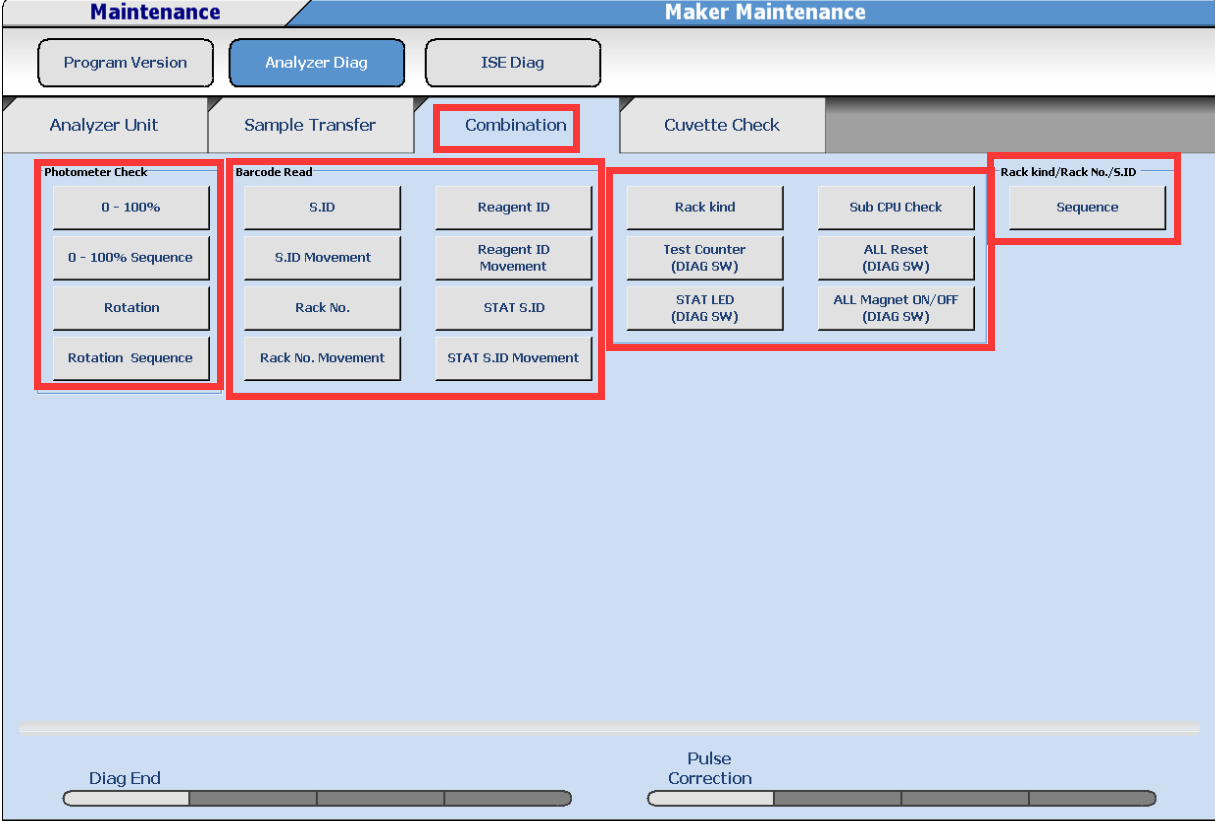
这是第三个页框,Combination组合,第一个是光度计检查,也是暗电流和满电流的0-100%T检查;第二个是条码阅读器的检查,样品架条码、样品条码、试剂条码、急诊盘的条码检查等。接着是架种类的判读、测试计数的查看、急诊灯的检查,还有子CPU的检查等,以及全部机械复位和全部机构电磁锁定的开启和解除。最后一个是架类型识别、架号及样品条码的的全系列检查流程动作。
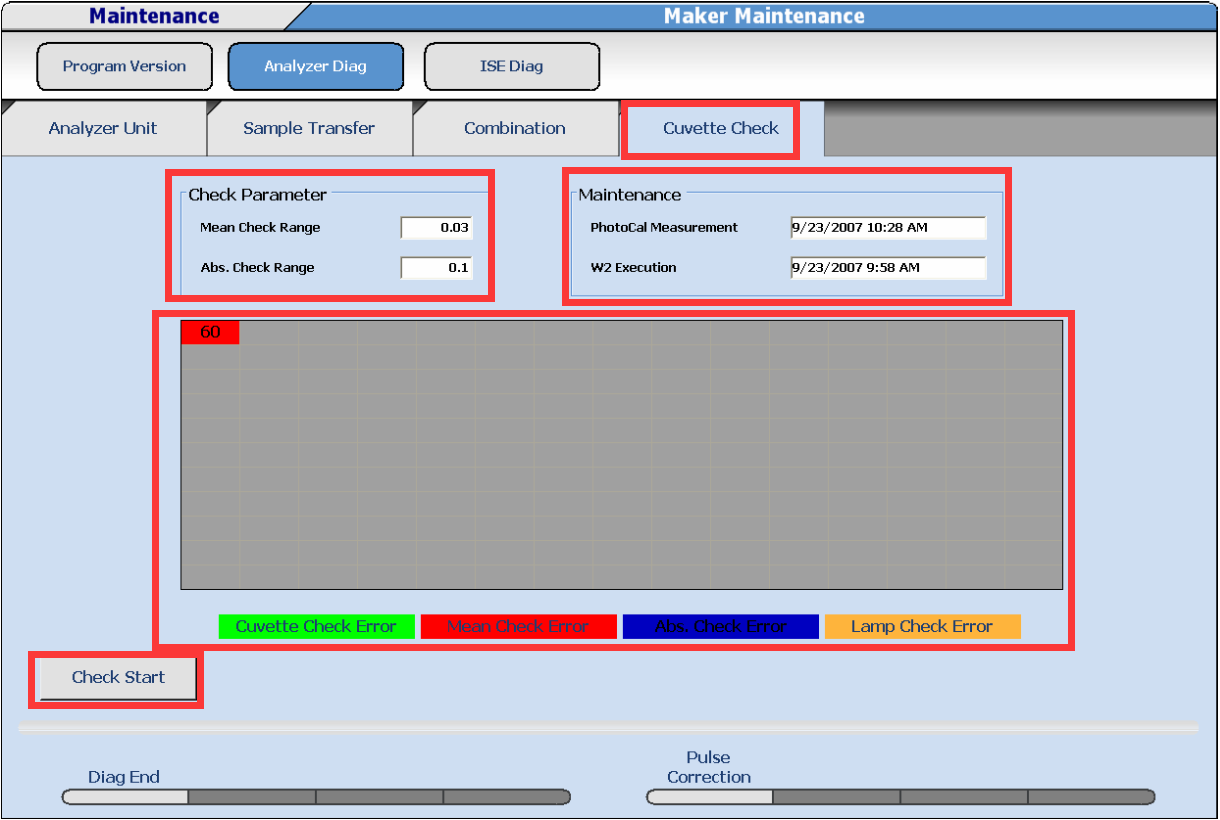
这个是第四个页框,反应杯检查,想必大家都熟悉这个。红色表示杯空白超限,限制包括两个方面,一个是杯空白超过1.6吸光度值,再一个是比所有的杯空白平均值超出Mean
check
range这个范围。这个范围可以选择,但最好用默认的0.03或0.02,就是说这个杯子不能超过所有杯子的平均值这么多,否则就红色显示。很多人为了不让红色出现,修改Mean
check
range变大,使红色消失。这样做骗了你自己,杯空白那么不平均,一旦这个杯子和其它杯子同时做一个项目,重复性肯定无法保证。
ABS.check
range也是可以修改的,这是表示这次的检查结果与上次机器保存的结果相差多大就报错,也就是蓝色错误。长期没有清洗杯子或没有进行杯空白检查,很容易出现蓝色报警,这没什么,与上次相差太大而已,确认杯子和数据没有问题的话,再按一下check
Start即可。
橙色出现表示光度计本身问题或灯泡需要更换。
绿色则是杯子擦伤,一个反应杯通过光度计光束时,光度计读取多达7个数据,这七个点正好贯穿整个反应杯的窗口,这样就可以计算前三个点的均值和后三个点的均值,一旦超过限制就会认为是擦伤了。
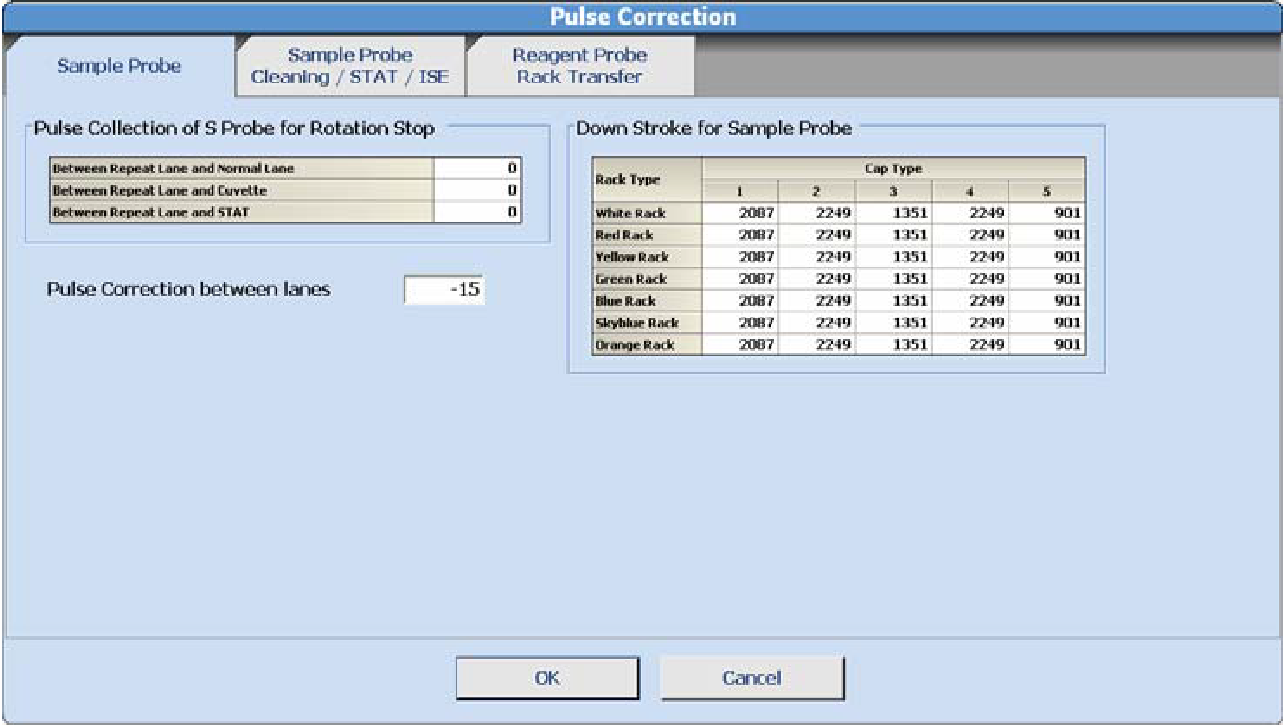
上图就是PULSE correction
步进数调整界面,主要是调整样品针的各个步进数值。样品针在轨道上针对不同种类的试管架、试管样品杯的下降高度、吸样轨和重测轨的摆动位置、整体偏差等步进调整。样品针在急诊盘、清洗剂瓶和ISE池的位置调整、试剂针在试剂盘、清洗剂位置的步进调整等。由于这种调整方式属于软调整,我个人不主张这么做,而是主张硬件调整。这里还是根据手册上的介绍进行。
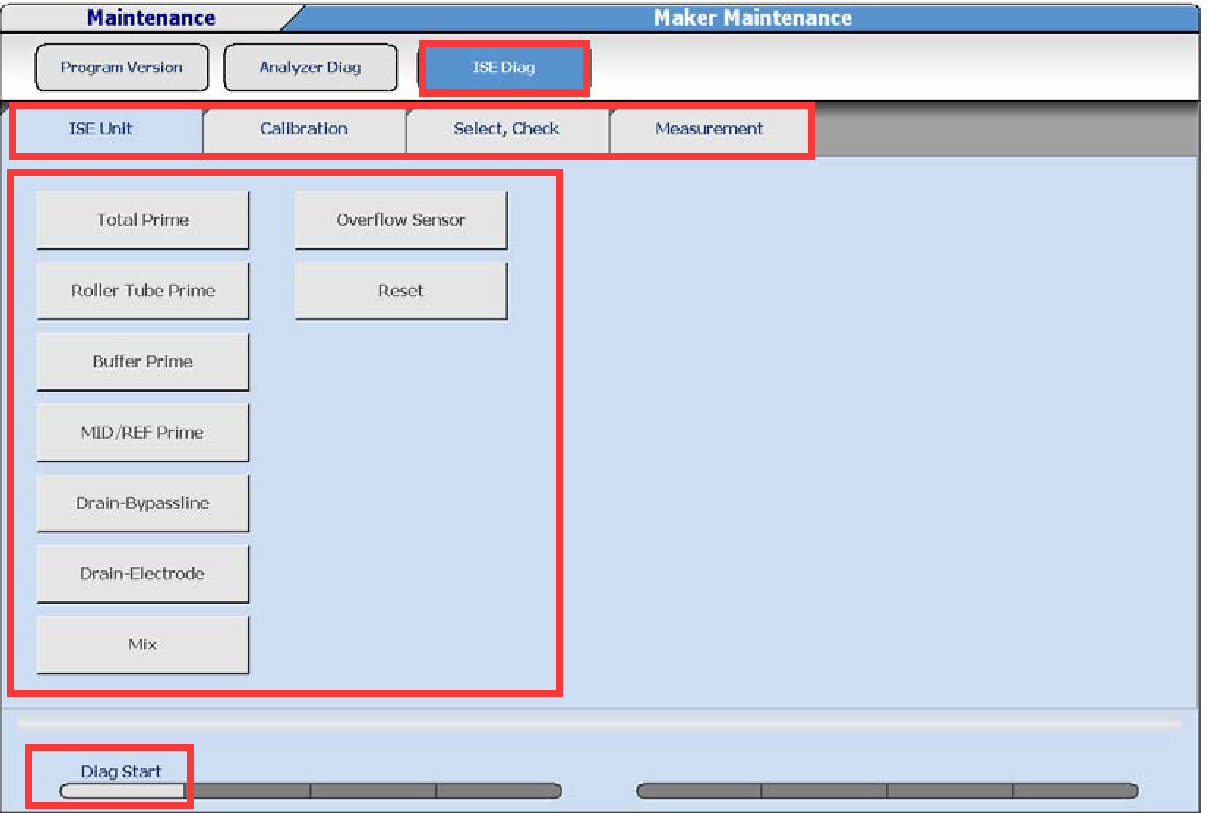
这是ISE诊断菜单,也是分为四个页框,但都一目了然,没什么复杂的。比如整体灌注、单个试剂灌注、混匀测试、排空混合池、检查溢流传感器、复位等等。还有校准、选择性检查和测量检查等。这里就不一一介绍了,详情看操作手册即可。
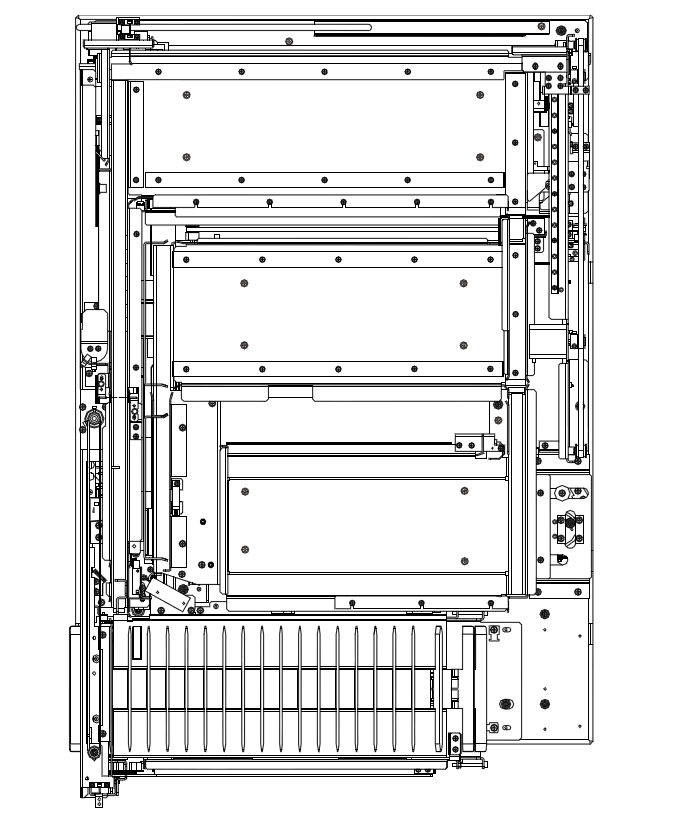
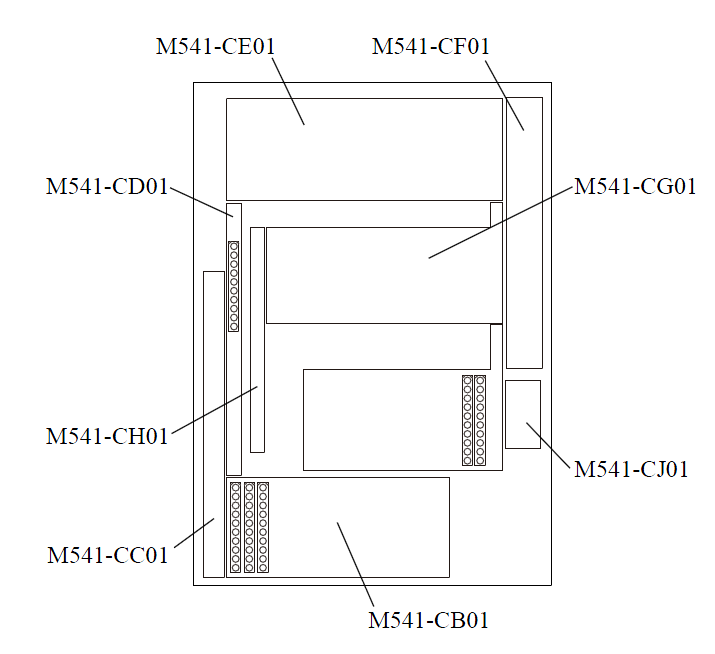
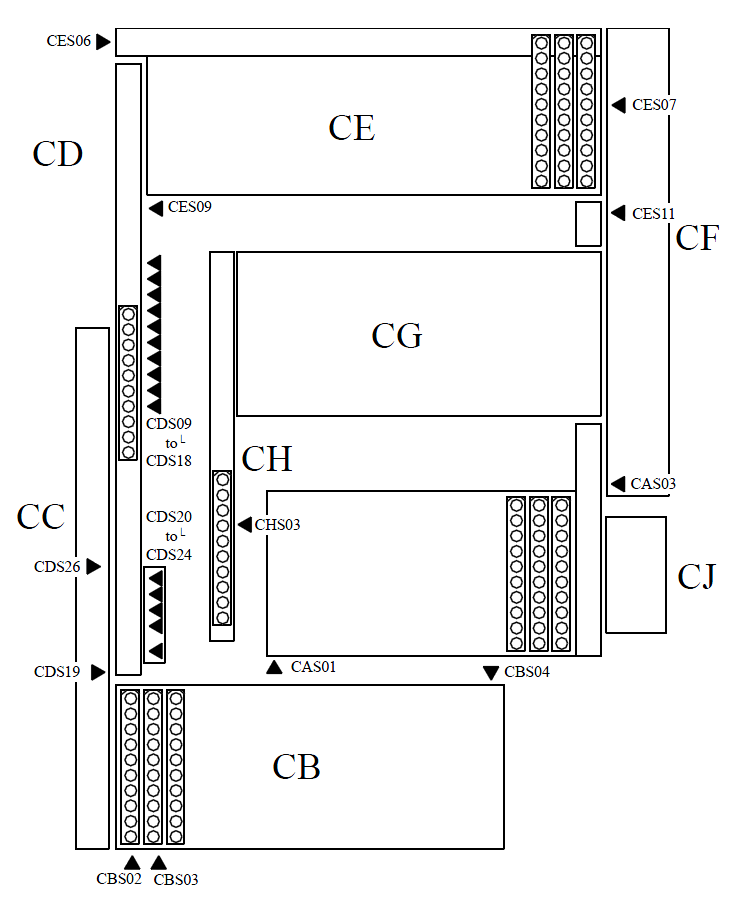
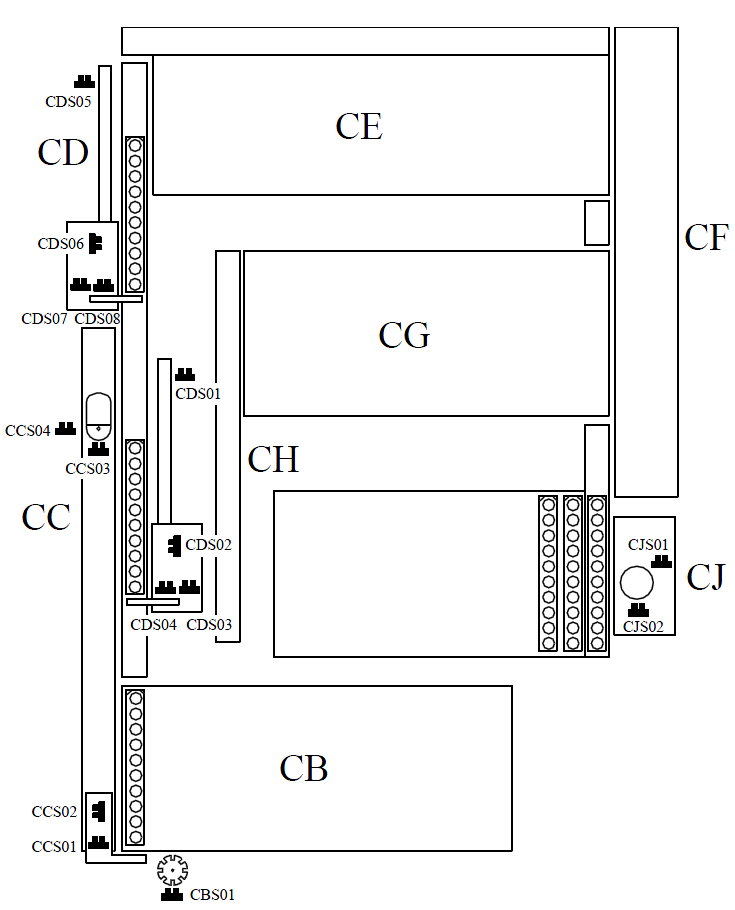
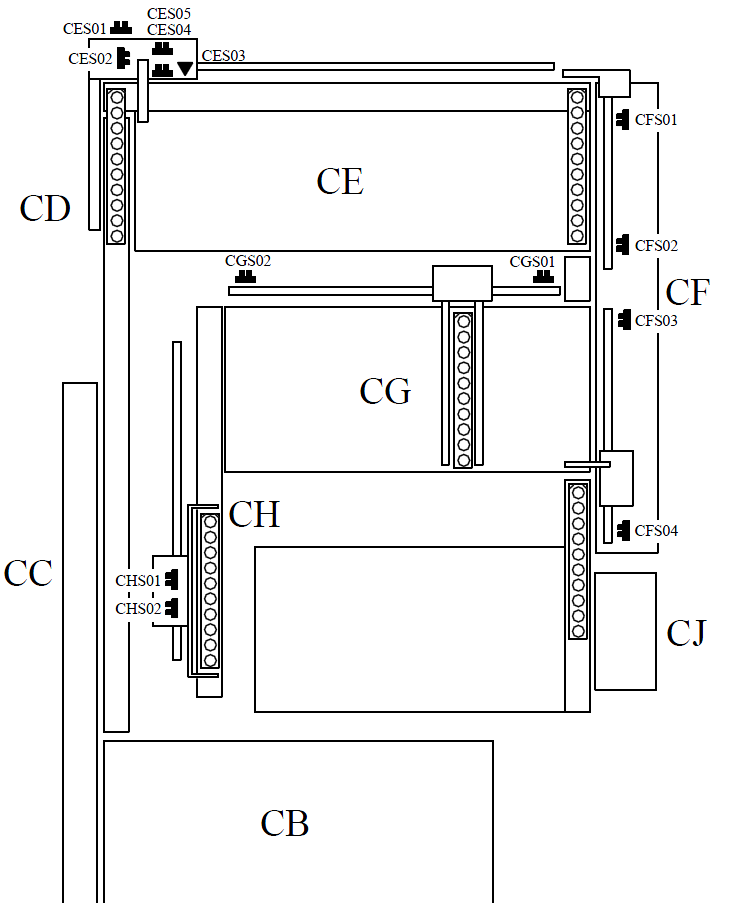
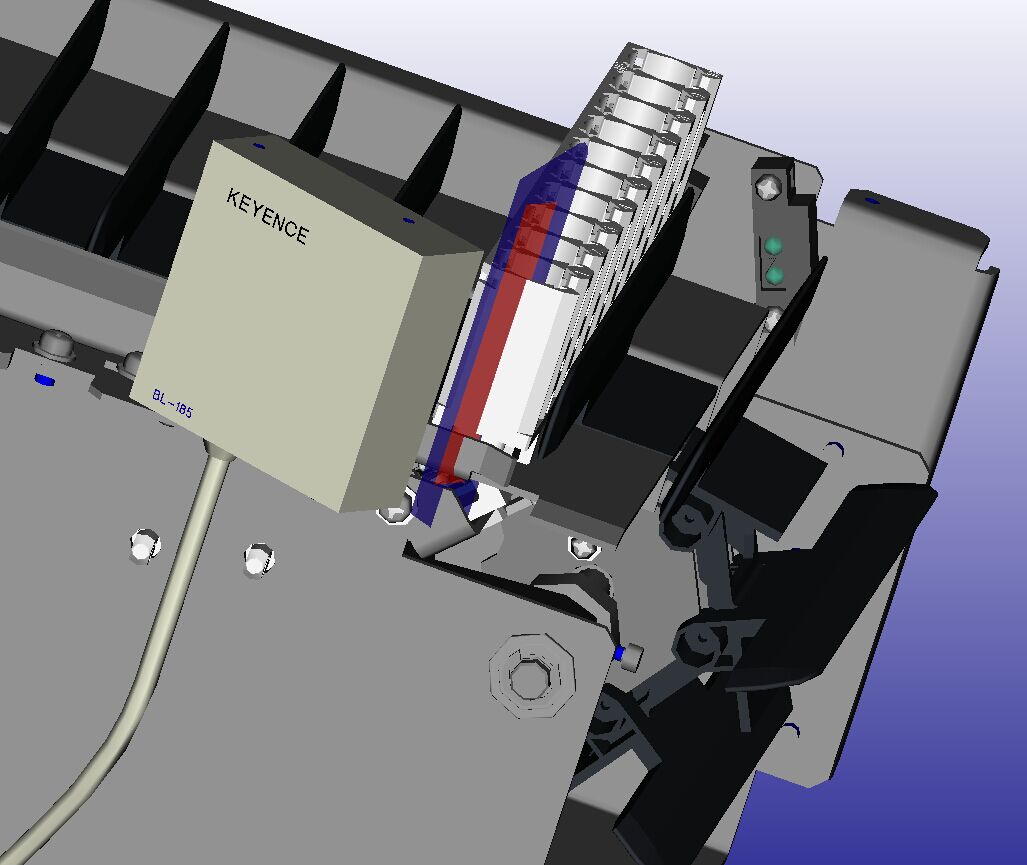
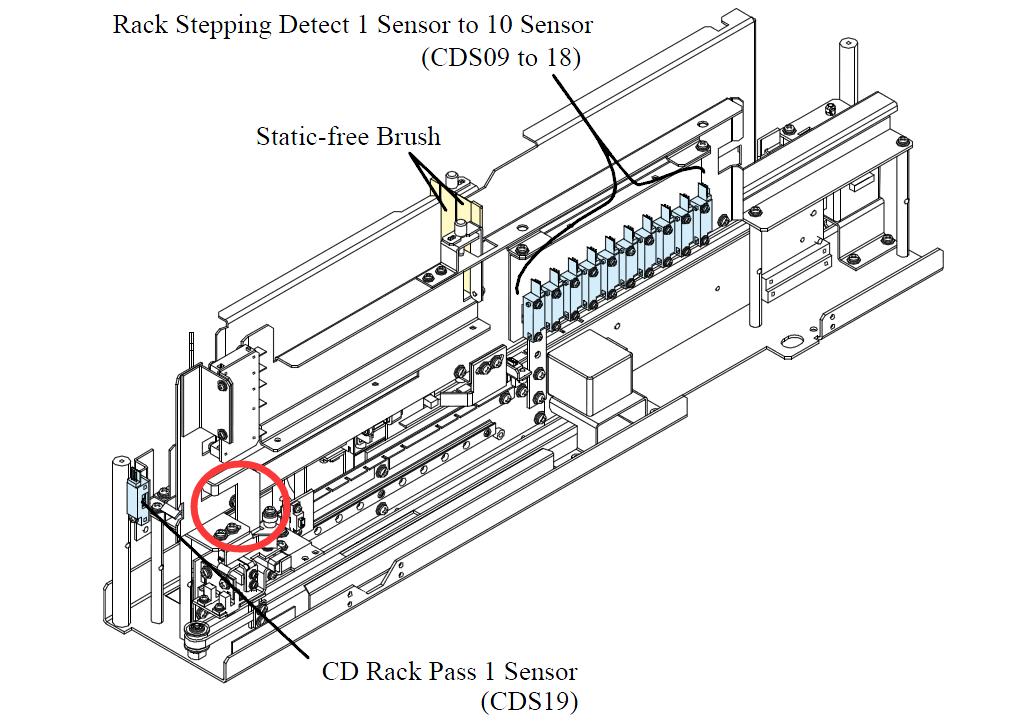
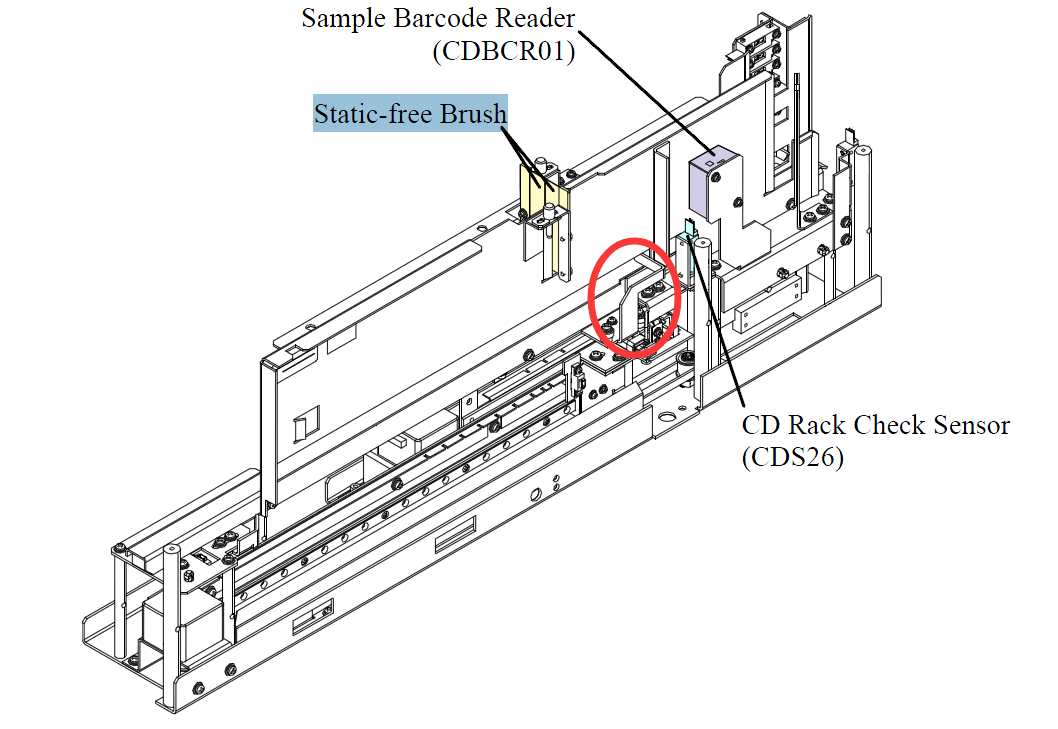
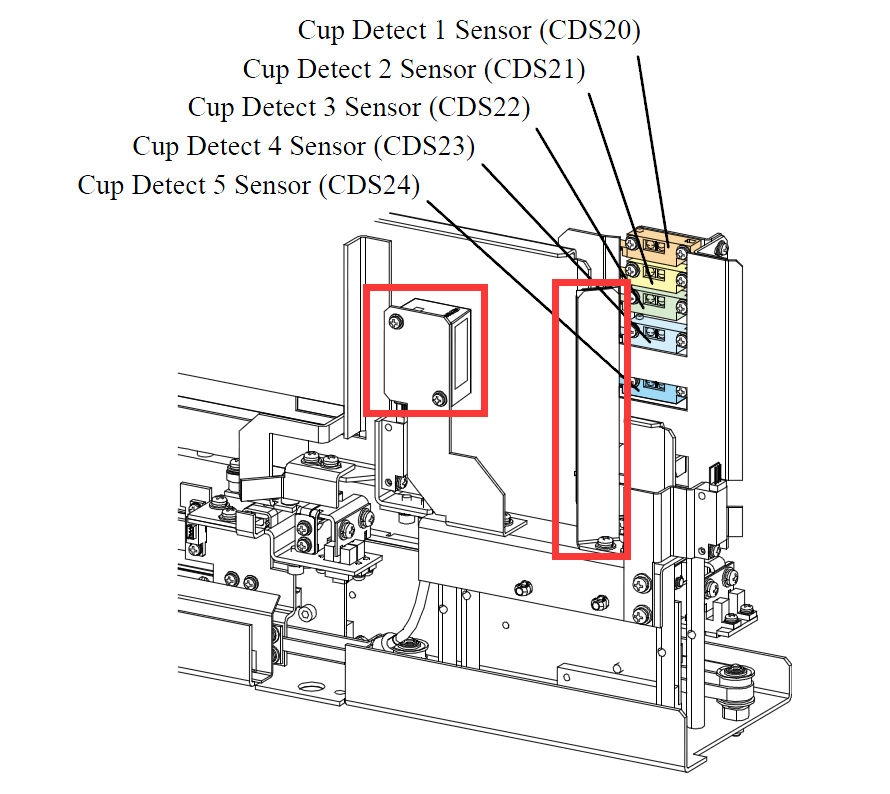
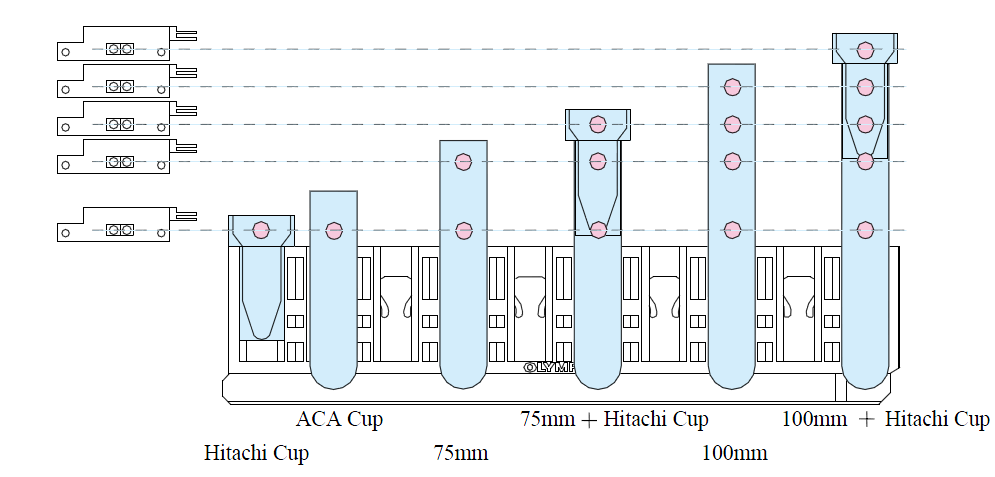
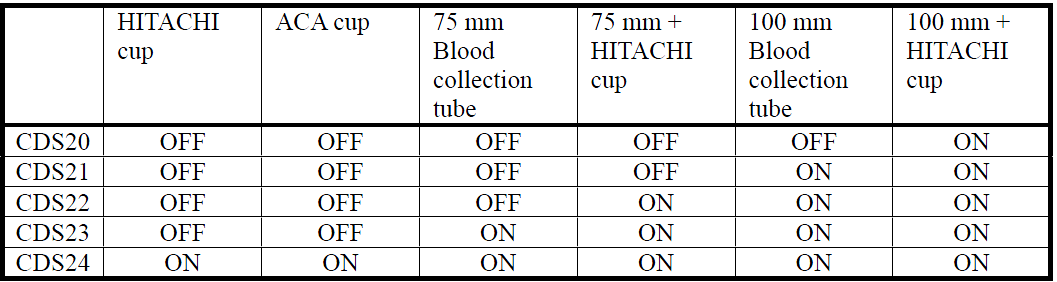
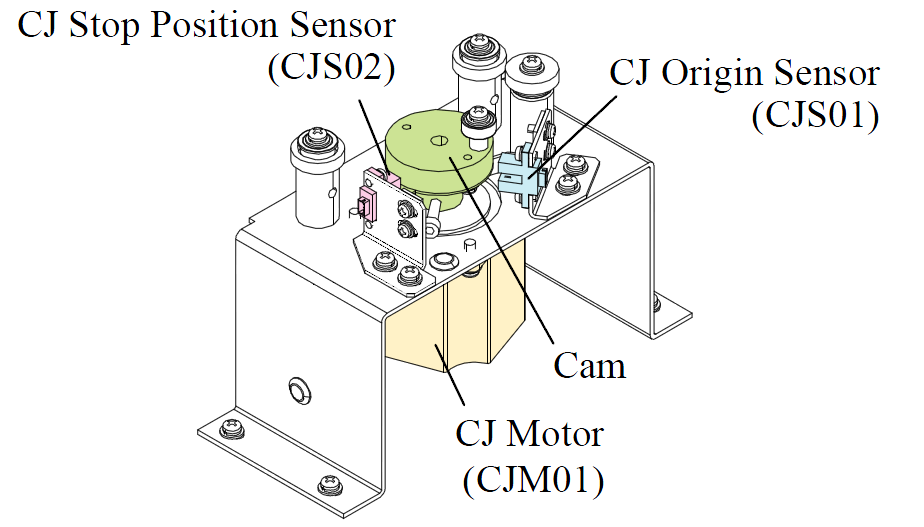
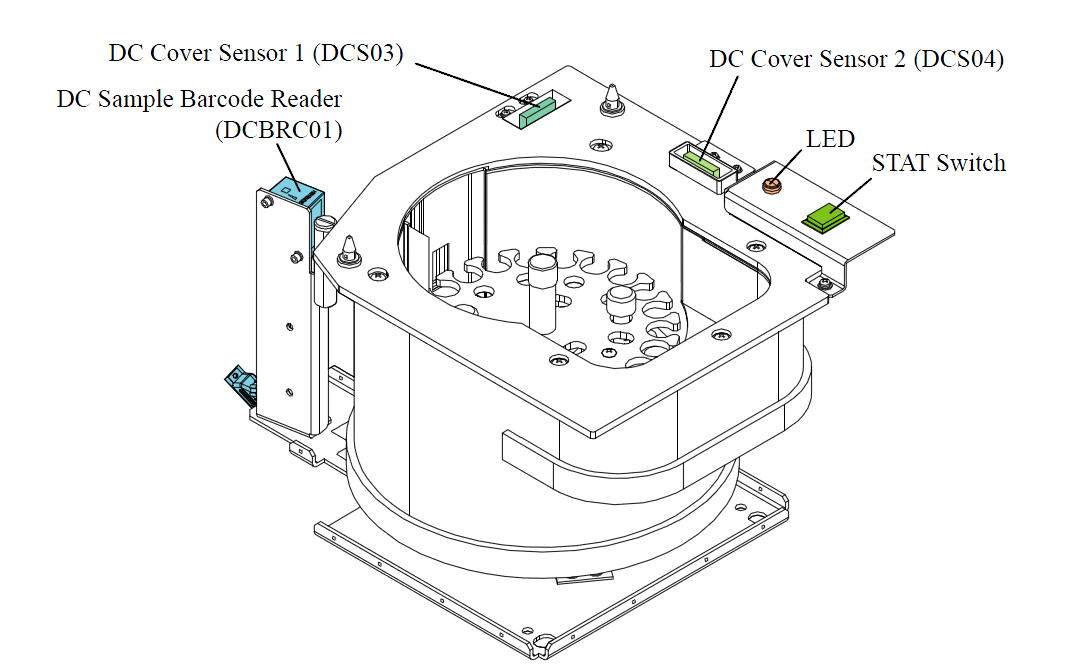
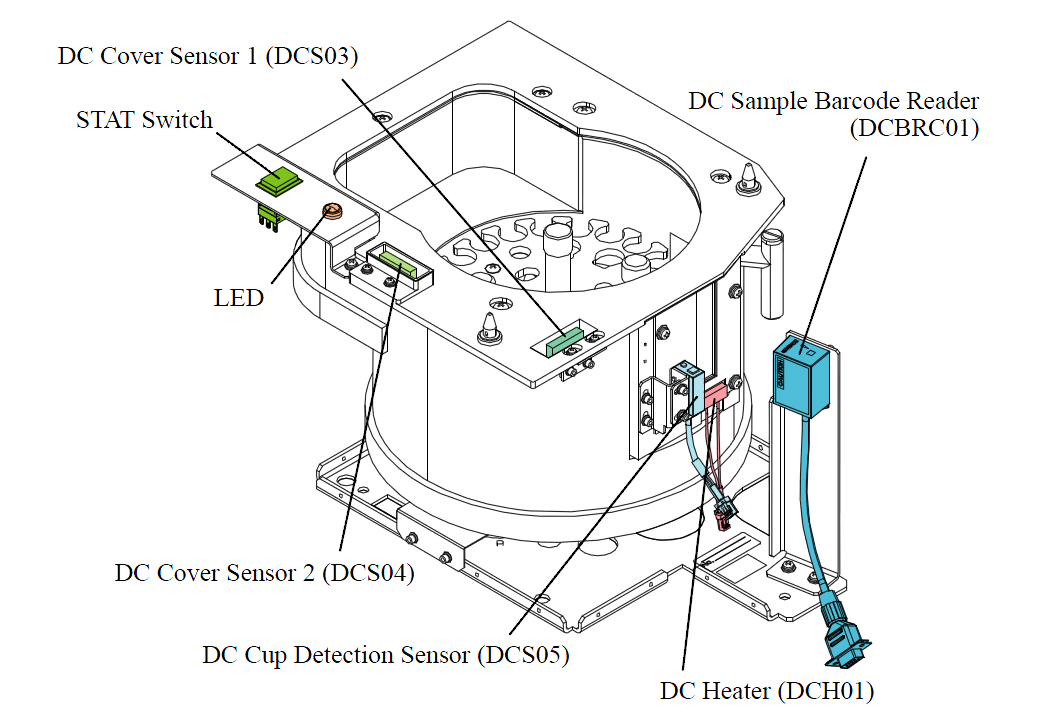
除了上面进样轨道各个单元外,还有几个传感器不归属这些单元,直接安装在CA轨道基板总成上的,如下图: 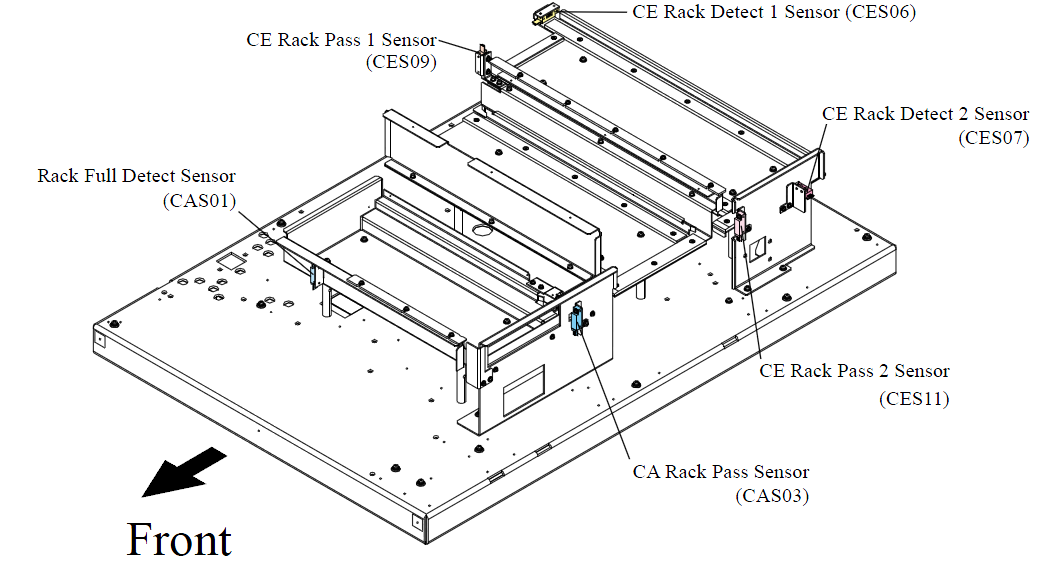 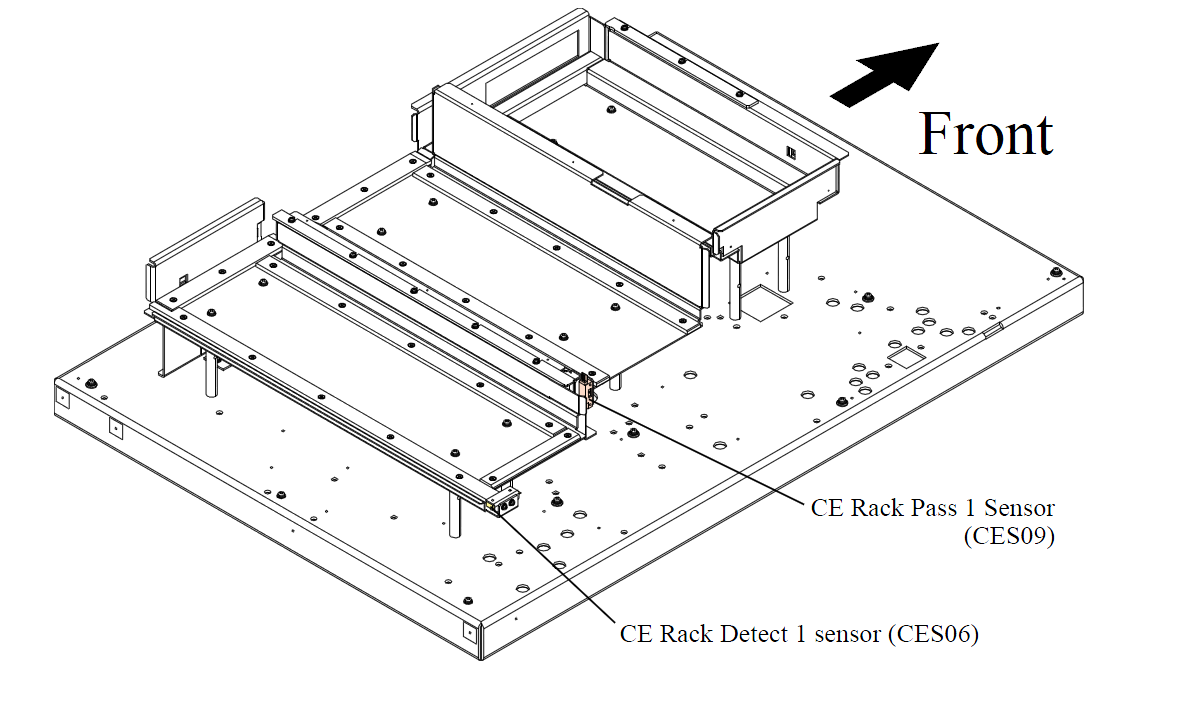
CAS01是满架传感器,当卸载区的试管架逐步推满的时候,就会触发这个传感器,发出报警提醒操作人员拿走卸载区的试管架,为后续试管架腾地方。
CAS03是架通过传感器,这个传感器感知架子到达,触发CJ推手将架子推到卸载区。
CES11也是架通过传感器,感知架子到达,根据需要启动CG单元的推手推送架子到重测轨还是启动CF轨的2号推手继续推送卸载。
CES07是探测架子从CE轨达到CF轨的。
CES06是探测架子从CD轨到达CE轨的。
CES09是探知加样完毕的架子达到CE轨之前的一个传感器。
这些传感器有些功能与各个单元上的传感器重叠,有时候是必要的,AU采用的是分布式总线控制,除了下位机要知道运动位置外,上位机也要知道关键的几个位置信息,放置出现撞架。
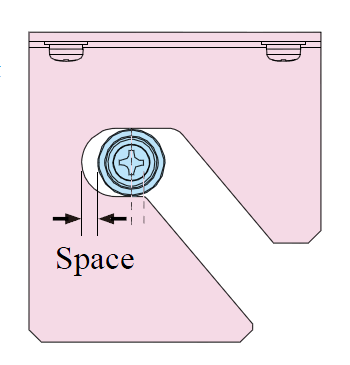
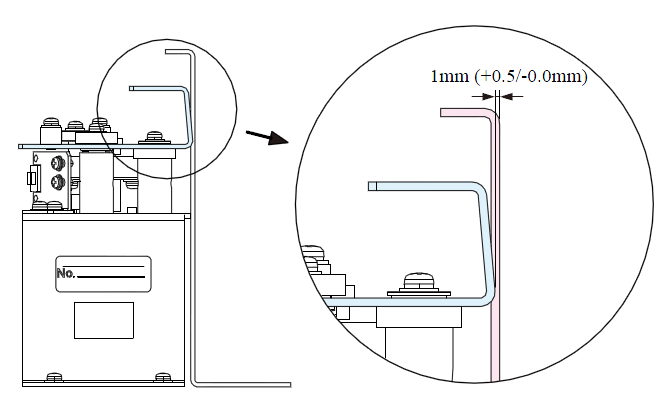
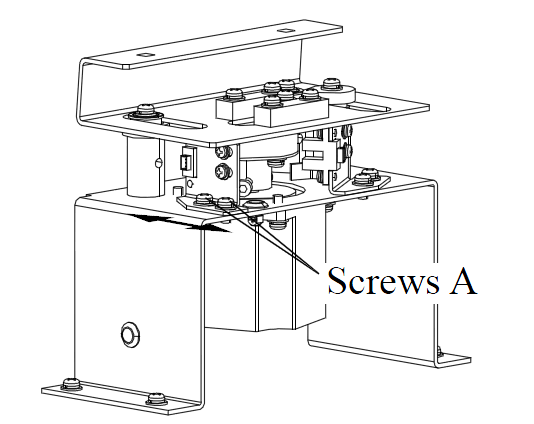
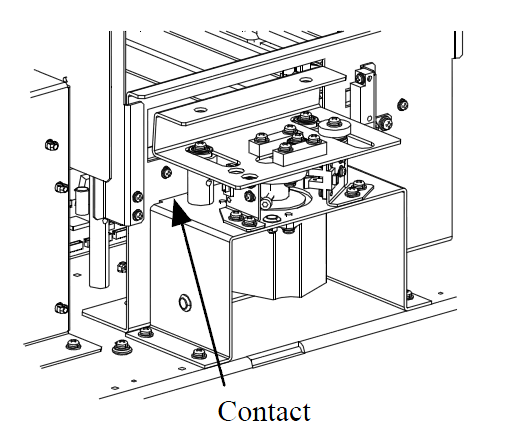
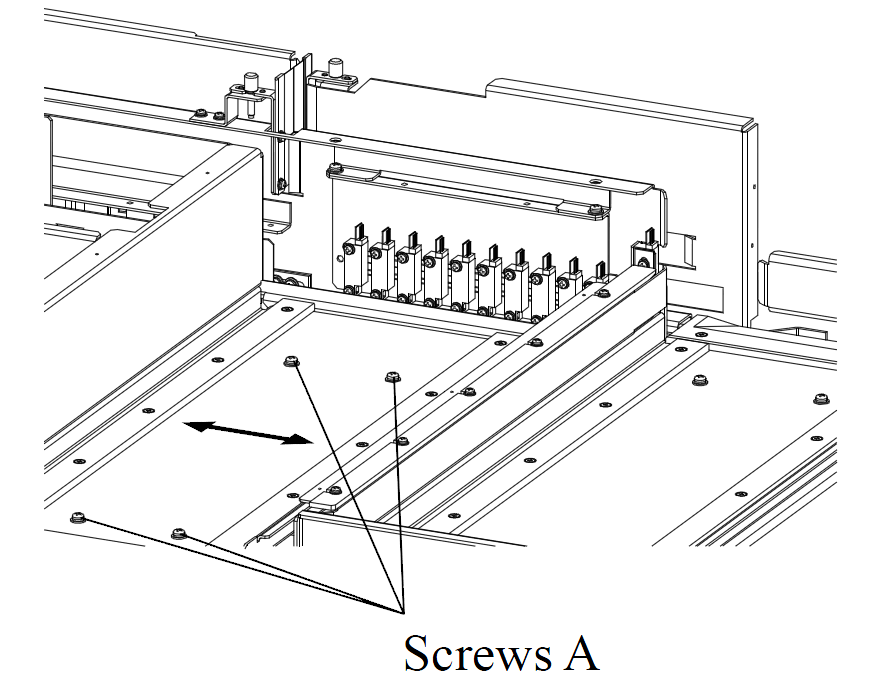
卸载区有几个位置需要检查和调整:
首先是卸载位推入引导架的位置检查和调整。这里没有推手,只有在入口出有一个引导架,其与右侧壁之间有个间隙,略大于试管架的宽度175±0.5mm。否则调整引导架的位置。
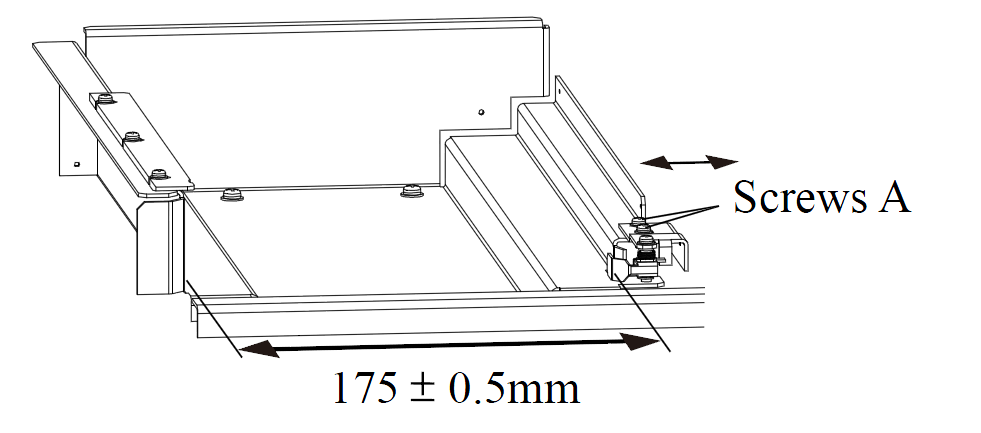
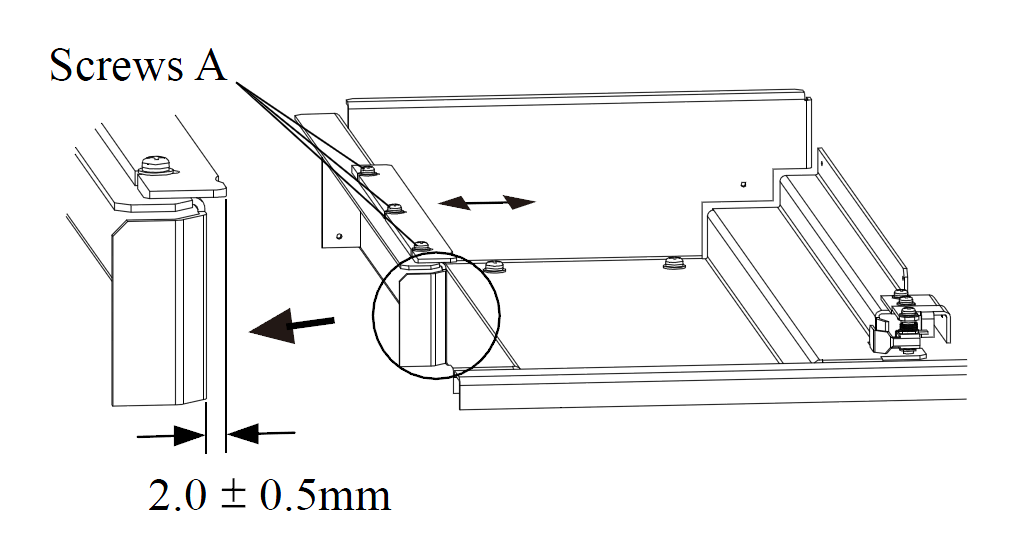
其次是防倒伏板的间隙调整,这块安装在上面的板子弹出左侧基板2mm,这样与右侧板形成挤压,防止架子倒伏,如果间隙过大就是出现倒架,间隙过小就会报卡架。
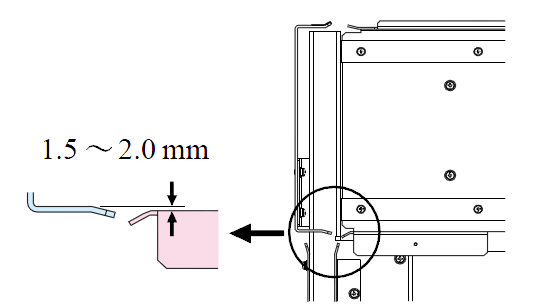
最后是CH重测轨的推手与卸载区基板的间隙,间隙过小过大会导致架子在重测轨上卡架,一般调整整个卸载区基板的位置。
除了上面进样轨道各个单元外,还有几个传感器不归属这些单元,直接安装在CA轨道基板总成上的,如下图:
CAS01是满架传感器,当卸载区的试管架逐步推满的时候,就会触发这个传感器,发出报警提醒操作人员拿走卸载区的试管架,为后续试管架腾地方。
CAS03是架通过传感器,这个传感器感知架子到达,触发CJ推手将架子推到卸载区。
CES11也是架通过传感器,感知架子到达,根据需要启动CG单元的推手推送架子到重测轨还是启动CF轨的2号推手继续推送卸载。
CES07是探测架子从CE轨达到CF轨的。
CES06是探测架子从CD轨到达CE轨的。
CES09是探知加样完毕的架子达到CE轨之前的一个传感器。
这些传感器有些功能与各个单元上的传感器重叠,有时候是必要的,AU采用的是分布式总线控制,除了下位机要知道运动位置外,上位机也要知道关键的几个位置信息,放置出现撞架。
卸载区有几个位置需要检查和调整:
首先是卸载位推入引导架的位置检查和调整。这里没有推手,只有在入口出有一个引导架,其与右侧壁之间有个间隙,略大于试管架的宽度175±0.5mm。否则调整引导架的位置。
其次是防倒伏板的间隙调整,这块安装在上面的板子弹出左侧基板2mm,这样与右侧板形成挤压,防止架子倒伏,如果间隙过大就是出现倒架,间隙过小就会报卡架。
最后是CH重测轨的推手与卸载区基板的间隙,间隙过小过大会导致架子在重测轨上卡架,一般调整整个卸载区基板的位置。
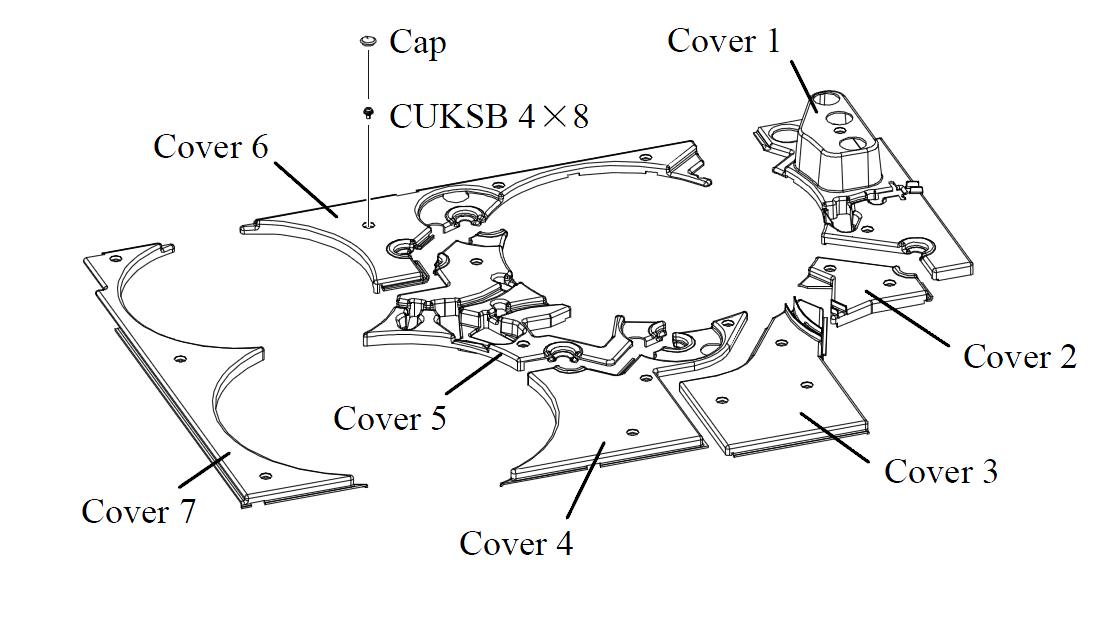
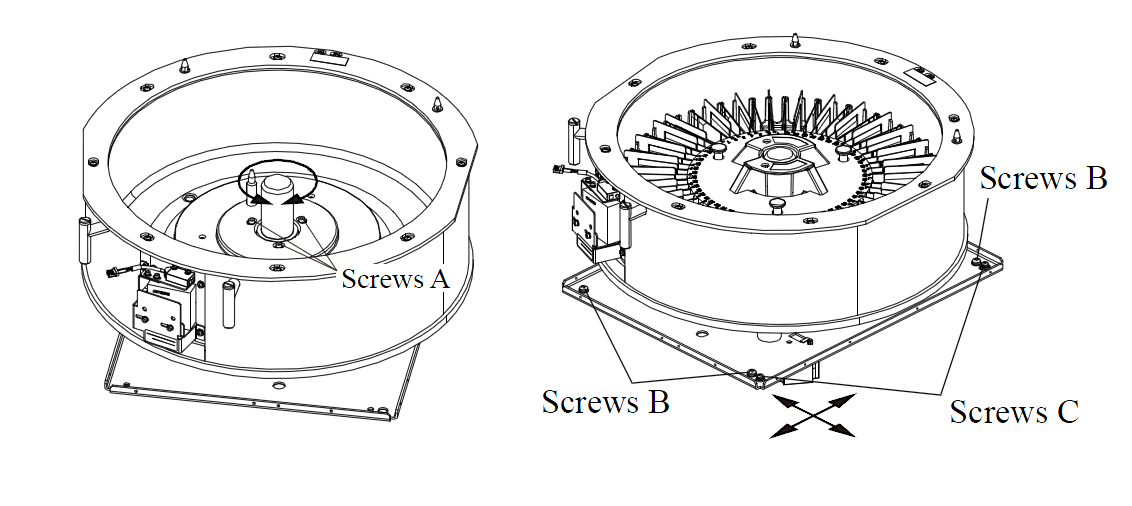
DA单元就是试剂盘单元,分为R1和R2两套完全一样的结构,但在装配上分位DA01和DA11,传感器马达等编号不同,UDCD42LED板的传感器设置也不同。下图是试剂盘盖的分解示意图,盖子虽然很简单,但却包含了很多东西。
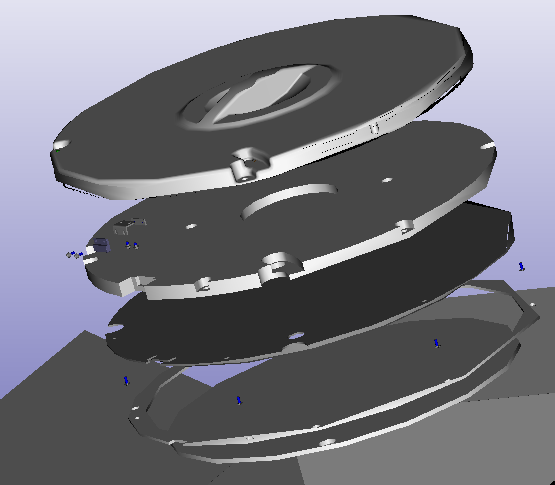
除了一个磁铁,与盖传感器(霍尔元件)配合外,盖内侧的防凝露高分子覆层也很重要,否则试剂仓的冷凝水聚集到上面,会对试剂瓶形成滴落导致试剂失效变质。还有就是最下面一圈的密封圈,也不要破坏了,试剂仓漏气就会导致温度不稳定。
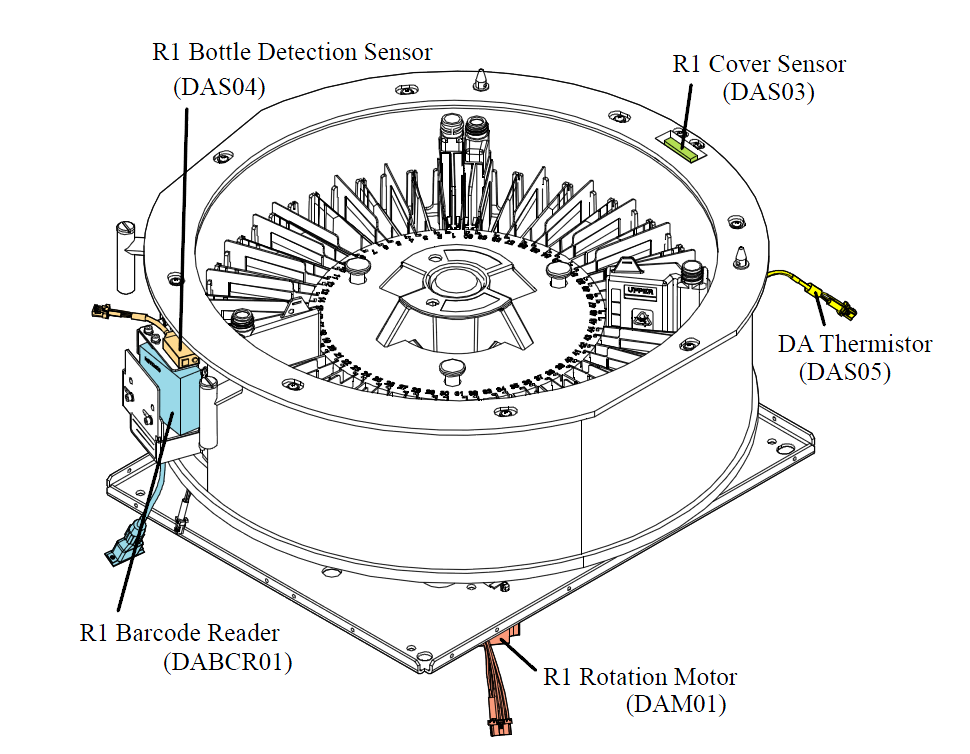  
上图是DA01和DA11的除盖后的结构示意图,可以看出二者几乎完全一样。
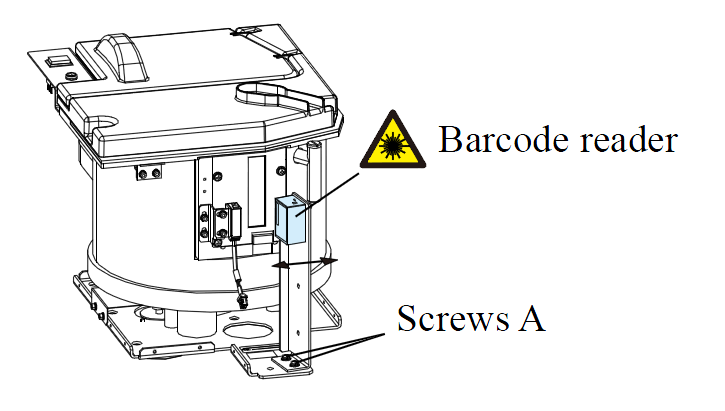
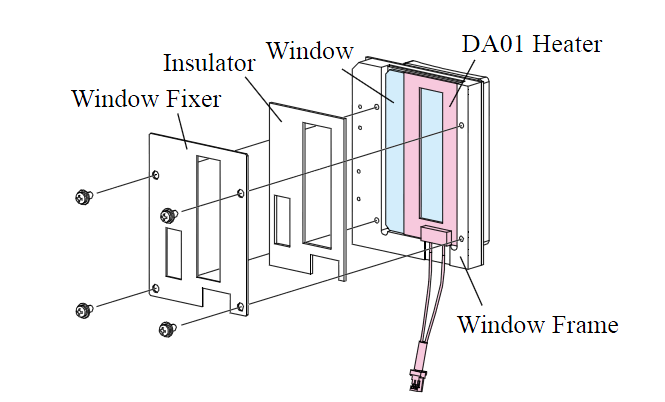
盖上都有一个DAS03/13的传感器,如果需要开盖维修的话,就要在这个位置放一块磁铁,骗过系统。条码阅读器光窗带有加热装置,防止起雾影响条码读取,注意加热片与光窗之间的前后密封,否则水汽从外侧进入,雾气更大。
对于试剂瓶的探测都有DAS04/14瓶探测传感器,这是自反射传感器。这个传感器的灵敏度需要准确,否则过高或过低都会导致运动中出现丢瓶,从而出现试剂空、试剂不足、没有试剂等情况。灵敏度过高,会导致浅颜色瓶子反射光束,或干脆被光束穿透再反射回来,形成瓶探测失败。过低也会找不到瓶子。当然位置不对也不行。丢瓶的原因还有一个是试剂盘旋转的时候不稳,上下晃动造成的,这个与安装有关。还有一个原因与试剂针有关,一般伴随着异响,所有项目试剂丢失或空,这个在老机型上经常发生,重新扫描又能用。
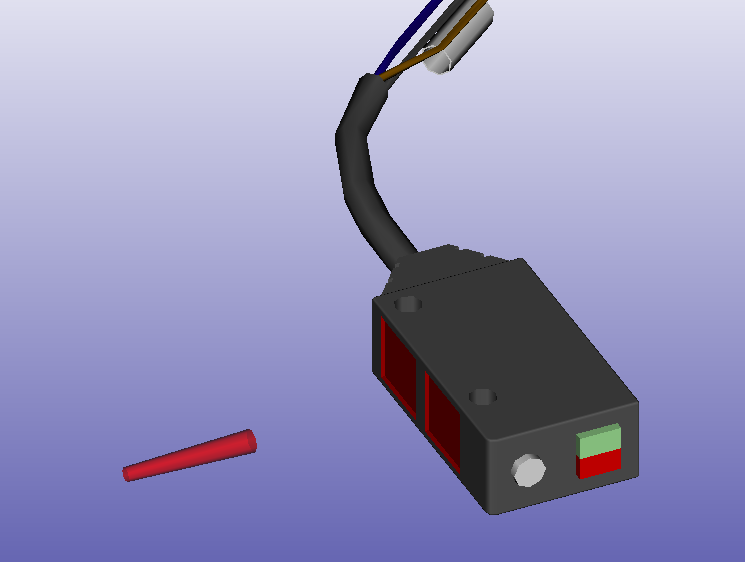
这就是瓶探测传感器,反应杯探测传感器、急诊盘试管探测传感器都与之类似。除了有发射接受窗外,侧面还有红绿两个LED发光管,白色的是可调电位器,但AU680灵敏度不可调,遗留机型是可调的。红色圆锥状的是形容光束的,会在瓶口看到一个微弱的红点。
整个试剂仓被保温层覆盖,仓室是由双层铝板拼合而成,接缝处在仓内底部,由密封胶密封。夹层有冷媒流过,循环压缩机制冷的防冻液,降低仓内温度。DAS05是试剂仓温度传感器,用来监控试剂仓的温度。
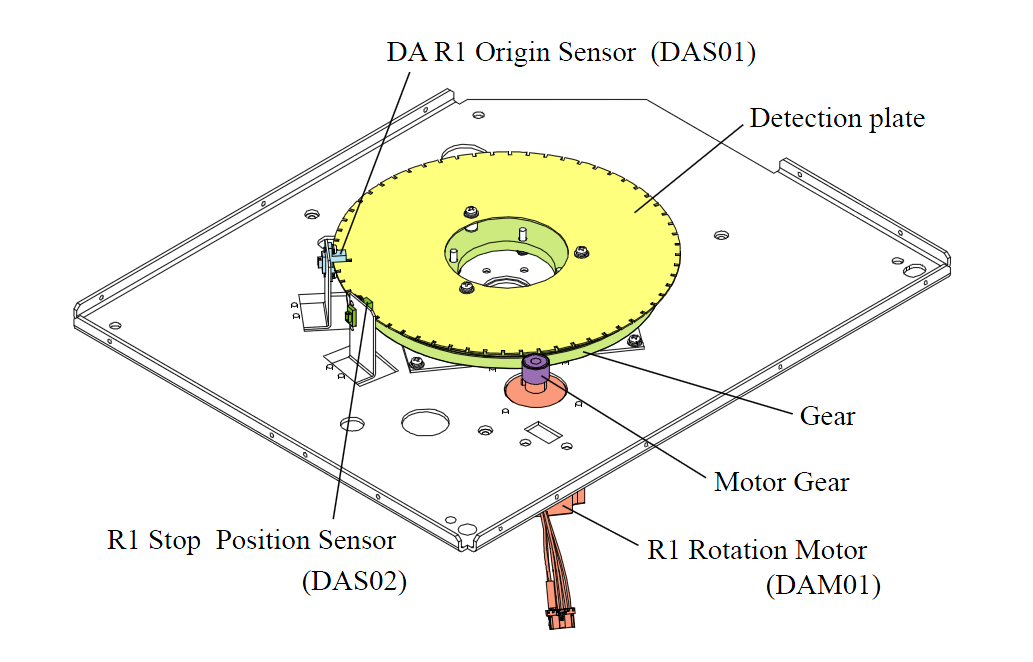 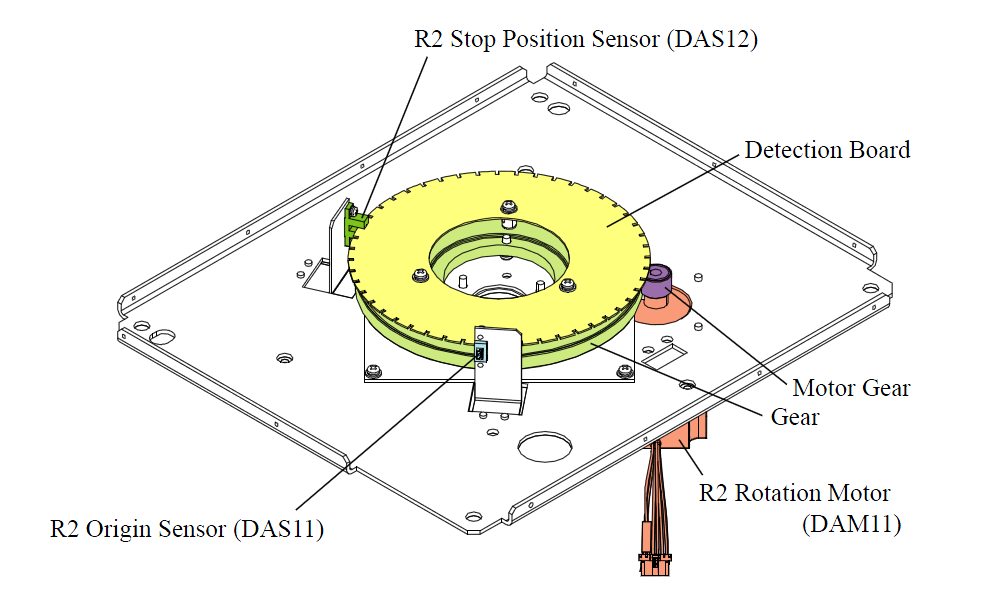
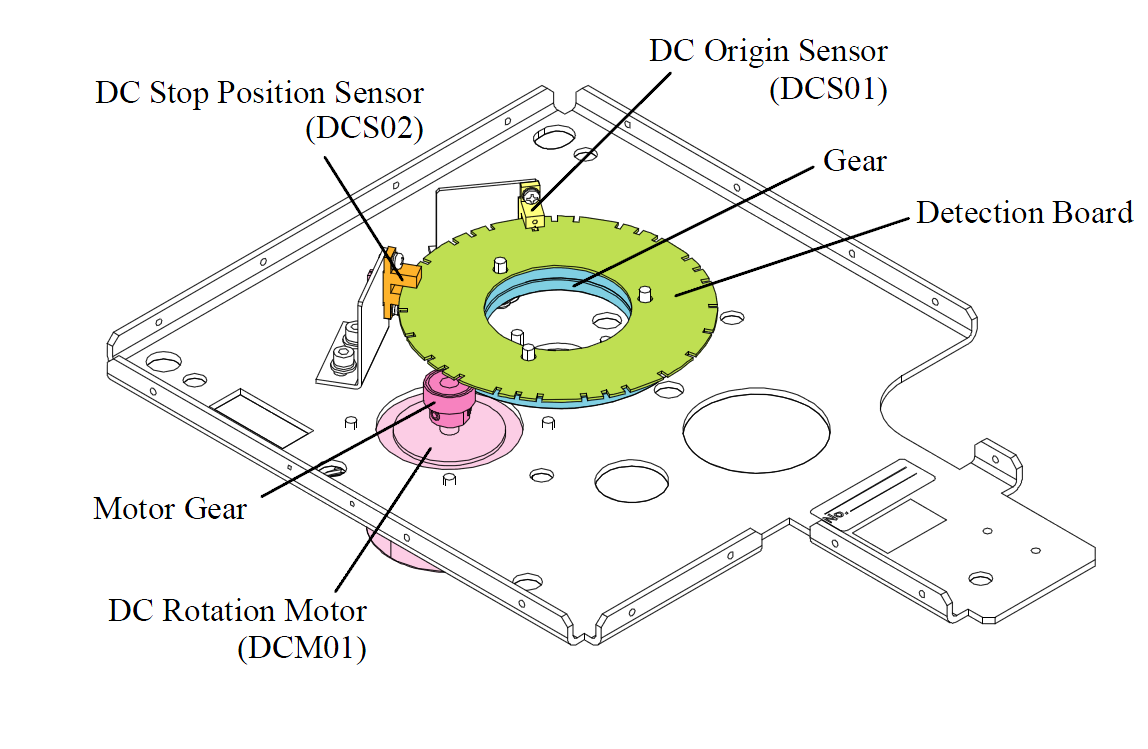
这是两个试剂盘去掉仓室,只剩下传动机构的示意图,也是完全一样。
马达DAM01/11直接齿轮驱动,试剂盘的运动齿轮与马达齿轮形成减速比,大概一个步进停止位就是一个瓶的位置。试剂盘运动齿轮带有码盘,码盘的分配与试剂瓶的位置一一对应,由DAS01/11初始位置传感器和DAS02/12停止位传感器监控。
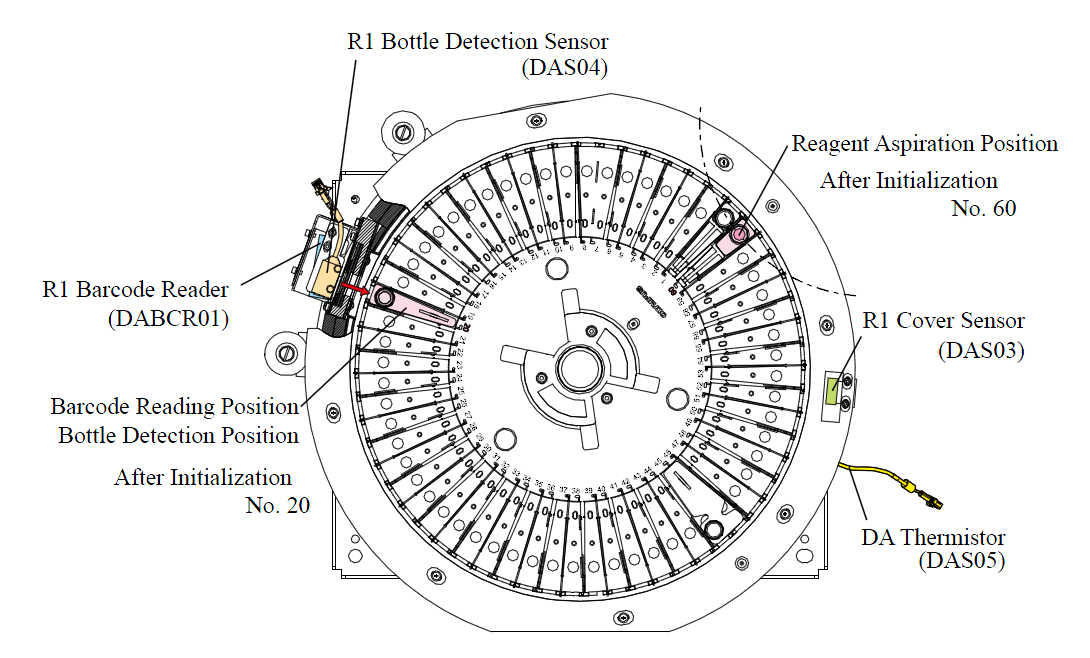 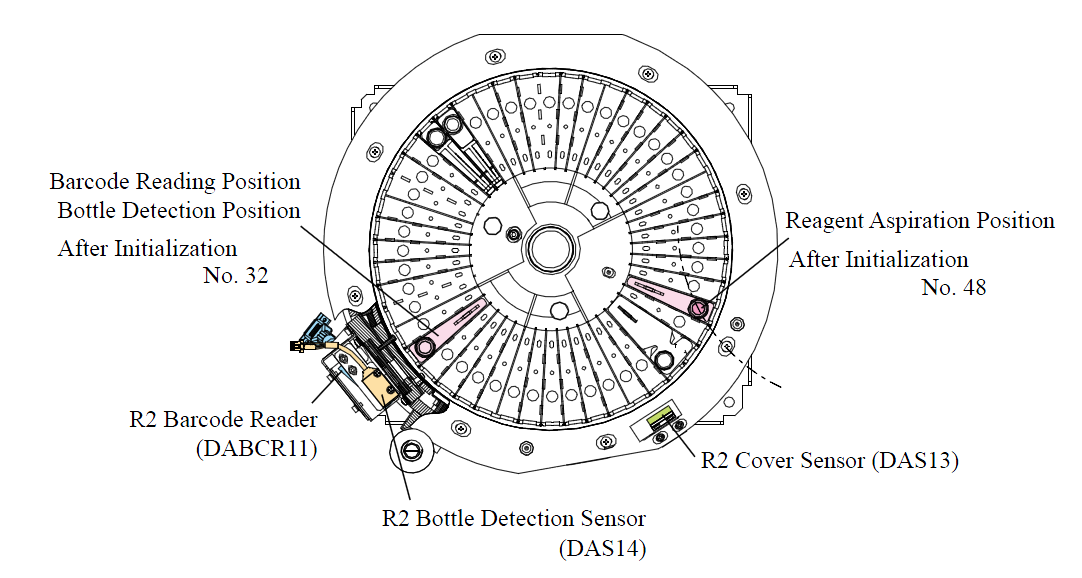
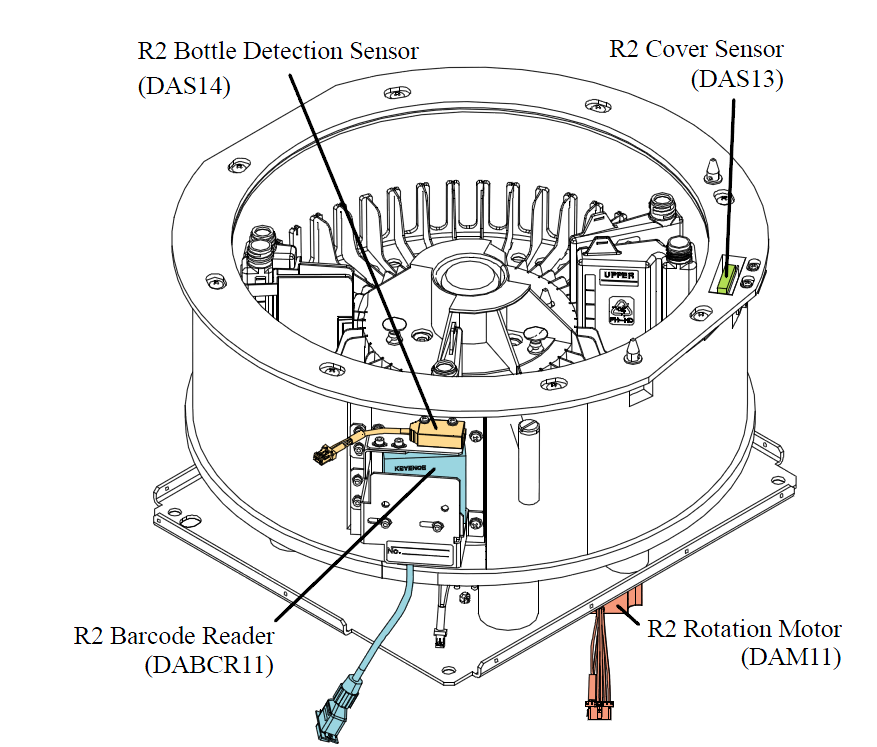
这是试剂仓去盖后的顶视图除了少了一个温度传感器,二者也完全一样。
DABCR01/11是试剂瓶条码阅读器,与瓶探测传感器上下排列,在同一个位置同时扫描条码和试剂瓶的存在。
在DA01复位时,试剂针吸取位置是60号位,条码和瓶探测传感器探测位置是20号位。
在DA11复位时,试剂针吸取位置是48号位,条码和瓶探测传感器探测位置是32号位。
当然,两个试剂仓只是在结构上雷同,在试剂瓶的数量上是不一样的,DA01是60个试剂位,DA11只有48个。
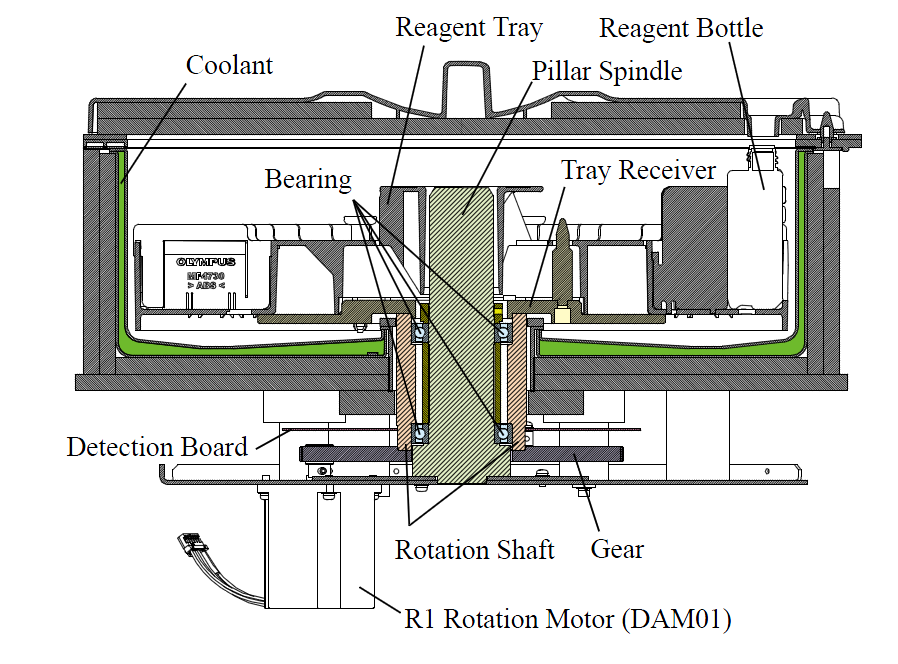 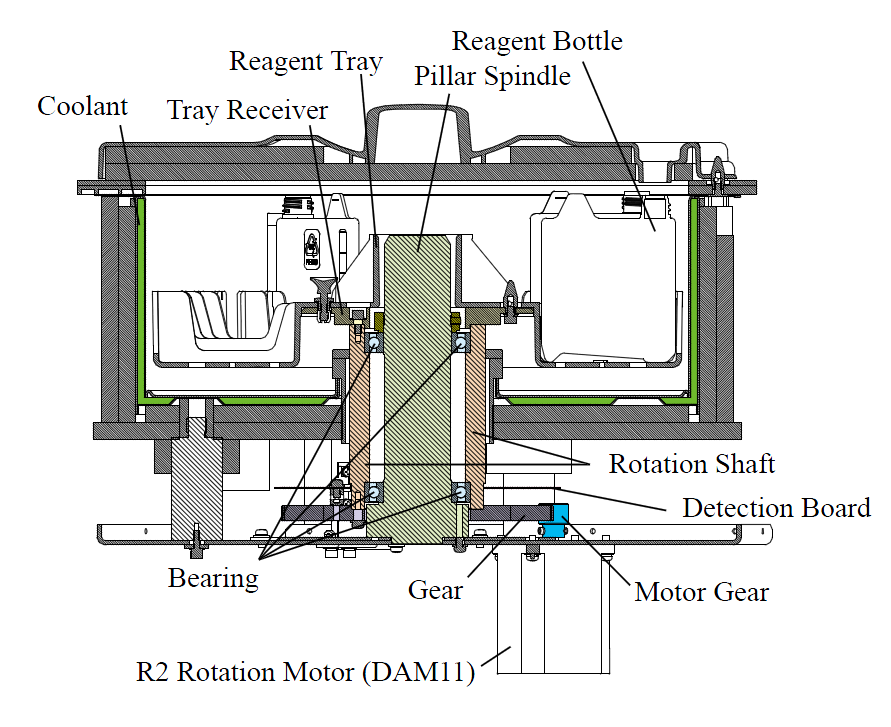
上图是两个试剂仓的剖面图,绿色的部分就是冷媒夹层。
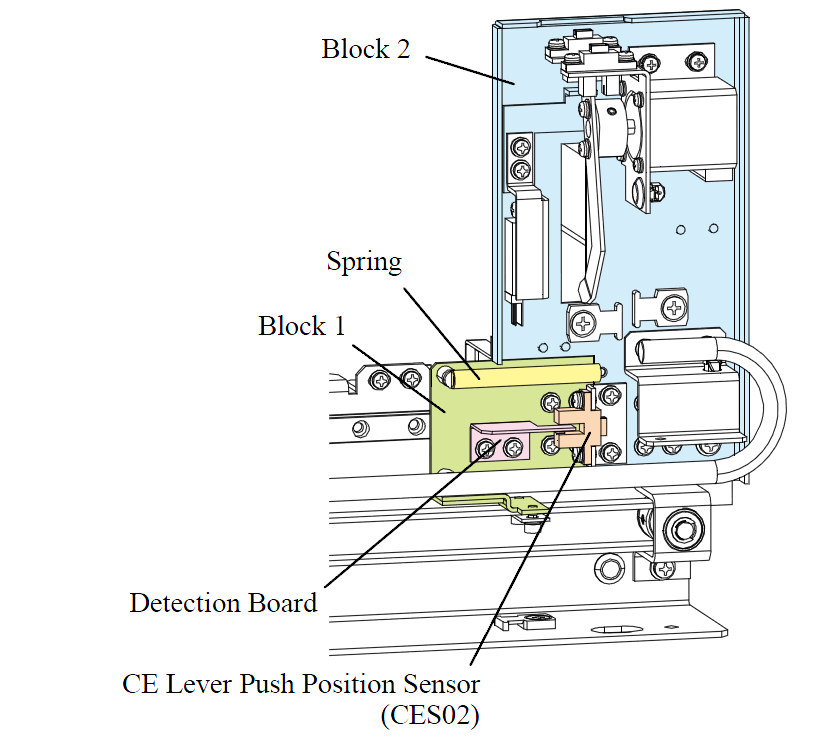
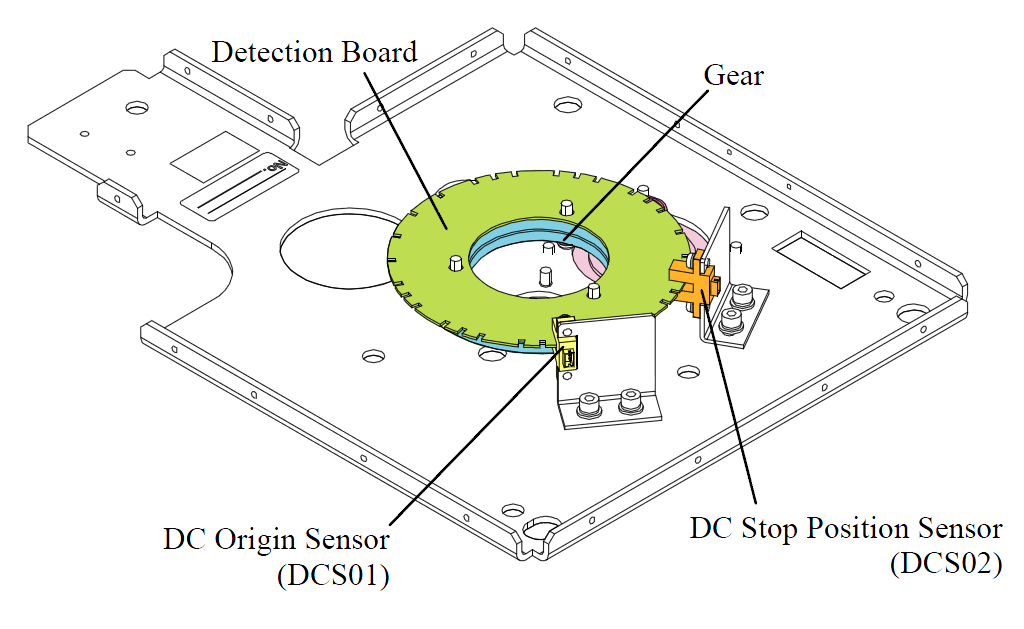
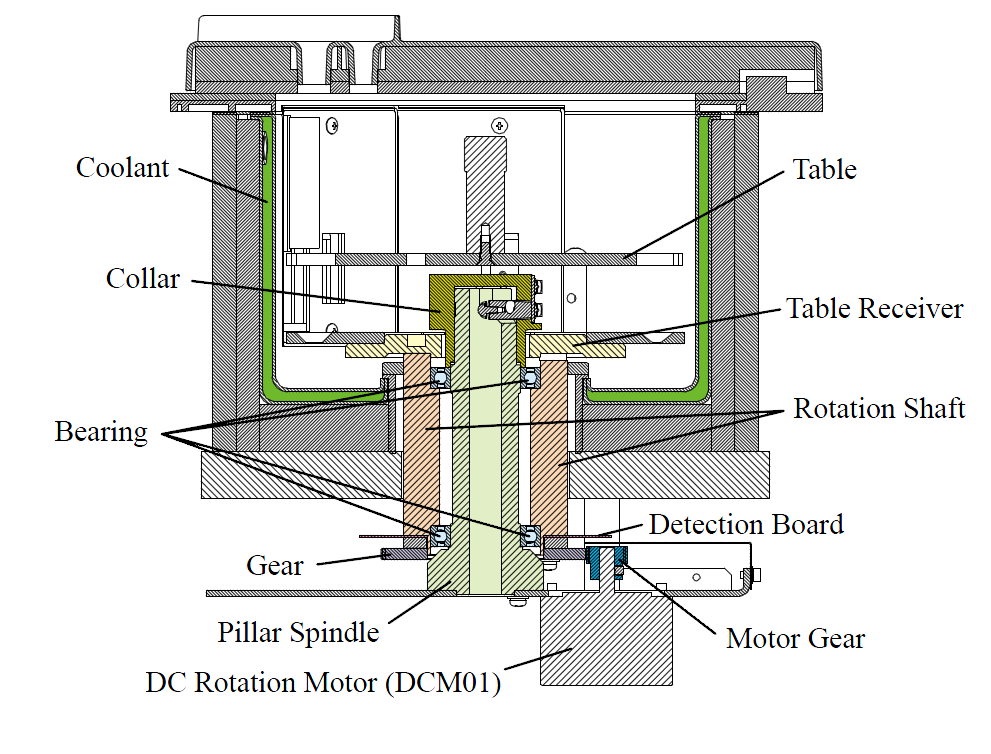
Pillar
Spindle旋转柱轴通过由两个轴承组成的轴套形成整个系统的支撑,与基板固定连接。码盘Detection
Board和反应盘运动齿轮及旋转轴组合,马达及其主动齿轮与之配合,形成旋转系统。齿轮与齿轮接触点需要润滑,但润滑时注意不要太多,不要弄到码盘上,否则麻烦更大。码盘的清洁很重要,否则也会误判。AU680的码盘间隙很小,清洁起来极其不方便,不如以前的机型方便。轴套则一般情况不需要润滑,即便润滑手法也很麻烦,除非要更换轴承或者密封破损灰尘进入。
下面是试剂盘初始位置传感器的检查和调整步骤:
首先复位试剂盘[ R1/2 REFRIGERATOR UNIT
[DA]/ Reset ],然后执行[ R1/2
REFRIGERATOR UNIT [DA]/ Rotation
Pulse/ CCW
]反转试剂盘,按诊断开关开机计数脉冲数,确认对应的UDCD42板上的LED由亮变灭的脉冲数为8±3个脉冲范围,否则调整初始位置传感器的位置。
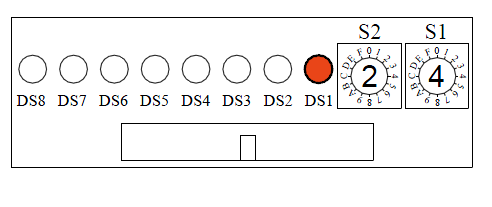 
上图是DA01的UDCD42板示意图和传感器位置示意图
上图是DA11的UDCD42板示意图和传感器位置示意图
下面是试剂盘停止位传感器的检查和调整步骤:
首先复位试剂盘[ R1/2 REFRIGERATOR UNIT
[DA]/ Reset ],执行[ R1/2
REFRIGERATOR UNIT [DA]/ Rotation
Pulse/ CW
]正转,按诊断开关,开始计数脉冲数,对应UDCD42LED由亮变灭的脉冲数在10-20个脉冲范围内,接着进行反转测试。
复位试剂盘[ R1/2 REFRIGERATOR UNIT
[DA]/ Reset ],执行[ R1/2
REFRIGERATOR UNIT [DA]/ Rotation
Pulse/ CCW
]反转,按诊断开关,开始计数脉冲数,对应UDCD42LED由亮变灭的脉冲数大于10个脉冲。否则调整停止位传感器的位置。
上面是DA01的示意图
上图是DA11的停止位置调整示意图
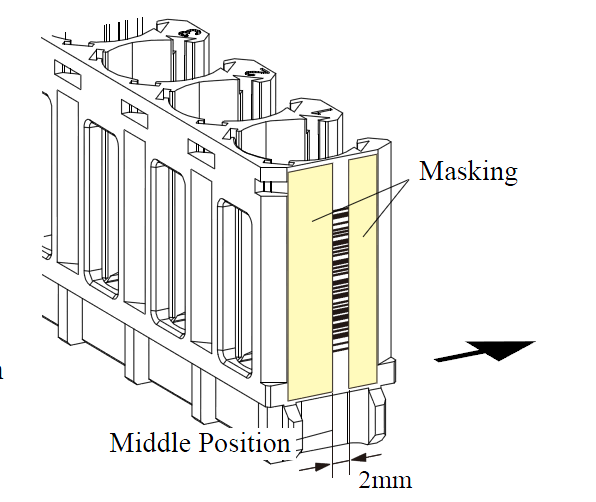
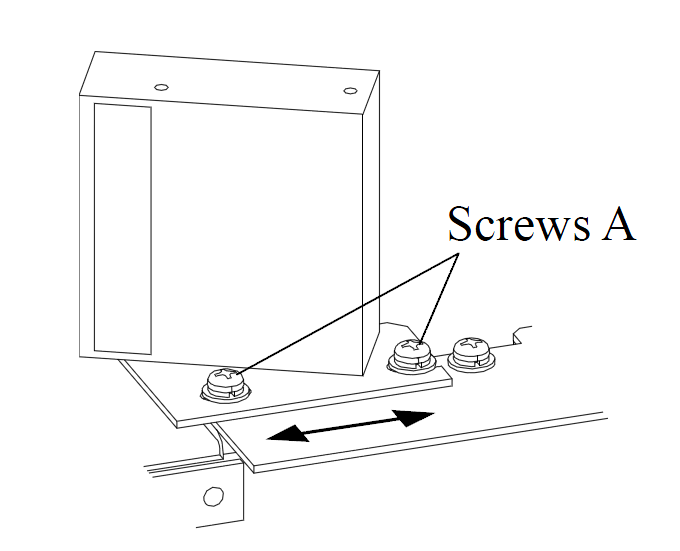
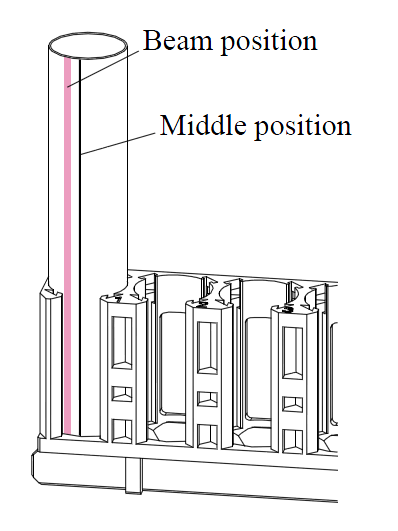
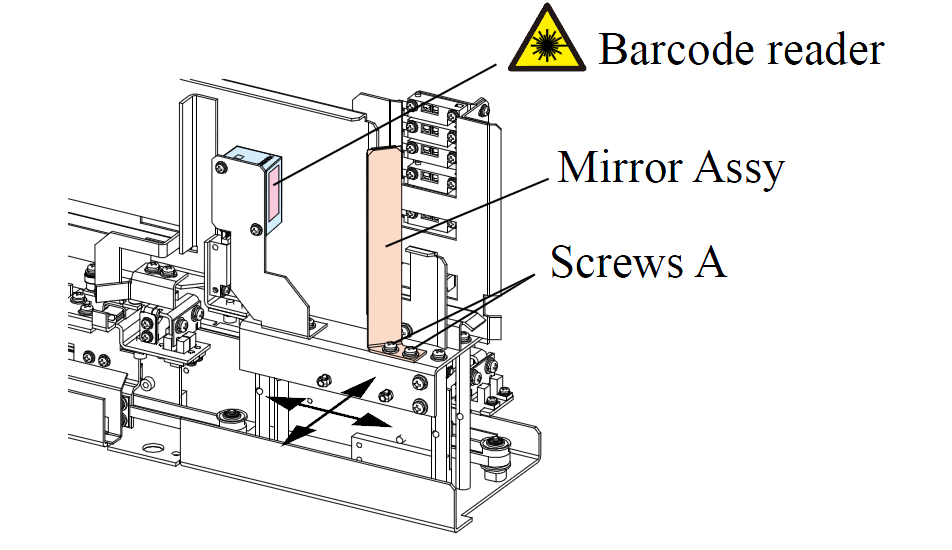
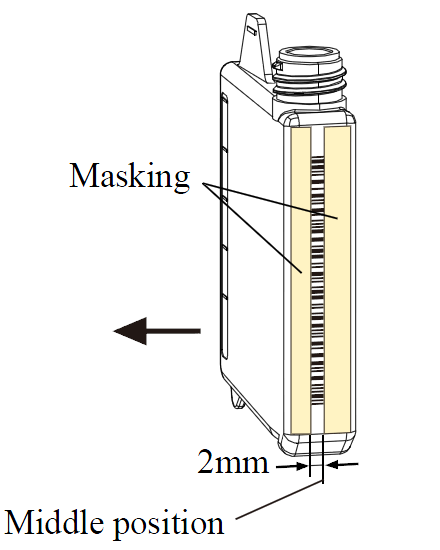
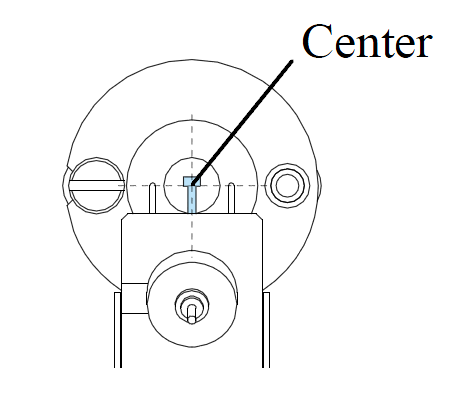
条码阅读器的检查和调整步骤:
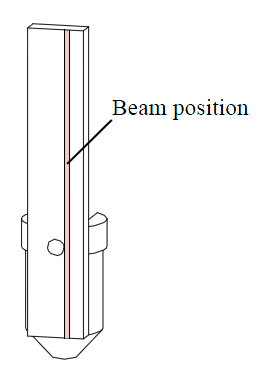
首先找一个带有条码标签的试剂空瓶,用不透明胶带遮蔽条码区域,只露出中心偏左2mm的区域。执行试剂盘复位[
R1/2 REFRIGERATOR UNIT [DA]/
Reset ],在读取位置放入遮蔽好的试剂瓶,执行[
Barcode Read/ Reagent ID
]观察光束就应该打在非遮蔽区域上,偏移太多或者扭曲就要进行条码阅读器位置的调整。
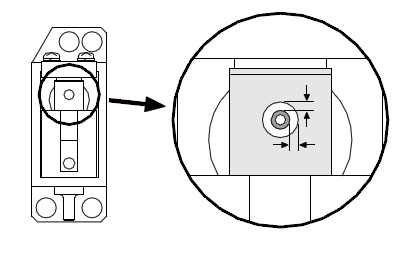
试剂瓶探测传感器的检查和调整步骤:
复位试剂盘[ R1/2 REFRIGERATOR UNIT
[DA]/ Reset
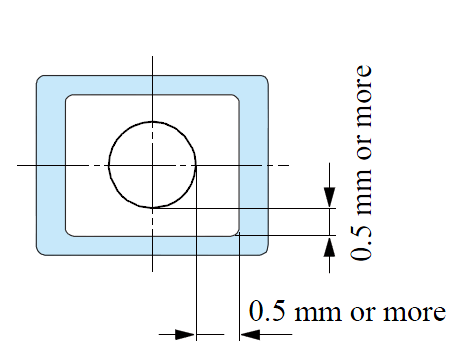
],在探测位置放入一个试剂瓶,检查瓶肩的红点位置,应该位于正中心,如果偏移严重,下一步没必要进行,先调整瓶探测传感器的位置。
然后执行[ R1/2 REFRIGERATOR UNIT
[DA]/ Rotation Pulse/ CW
]正转,按诊断开关计数脉冲数,UDCD42对应的LED由灭变亮的脉冲数应该大于8个。
再执行[ R1/2 REFRIGERATOR UNIT
[DA]/ Rotation Pulse/ CCW
]反转,按诊断开关计数脉冲数,UDCD42对应的LED由灭变亮的脉冲数应该大于8个。
上图是DA01的UDCD42示意
上图是DA11的UDCD42示意
这一步不借助UDCD42也可以,因为传感器本身自带指示灯,不好观察罢了,需要把上盖板打开才能看到。
而在可调整的瓶探测传感器上,灵敏度的调整是这样的:放入试剂瓶探测时,除了先观察红点位置外,就是先调整电位器往一个方向,使一个指示灯亮,记住电位器的这个位置。然后调整电位器往另一个方向,使另一个指示灯亮或两个指示灯全亮,再记住这个电位器的位置。然后调整电位器到两个记住位置的中间位置,这样灵敏度就调整完毕,不高也不低。或者将两个指示灯同时熄灭同时亮的两个位置的中间位置。
仓盖传感器的检查和调整步骤:
借助UDCD42板,盖上盖后对应的LED亮,并且晃动仓盖,指示灯保持常亮。拿掉仓盖,对应的LED灭。否则就要调整仓盖传感器的位置。
上图是DA01的UDCD42示意,下图是DA11的示意。
|
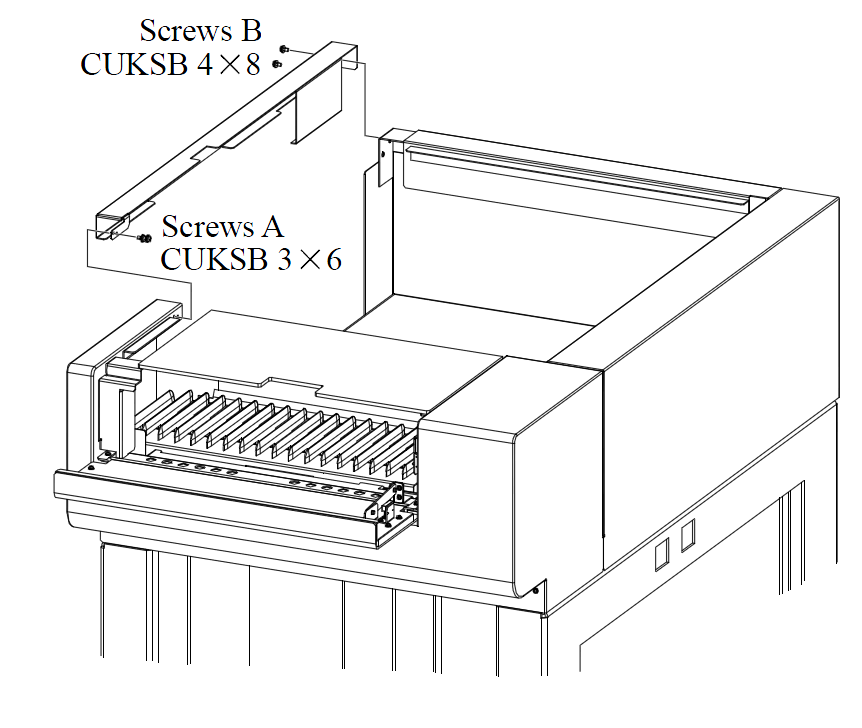
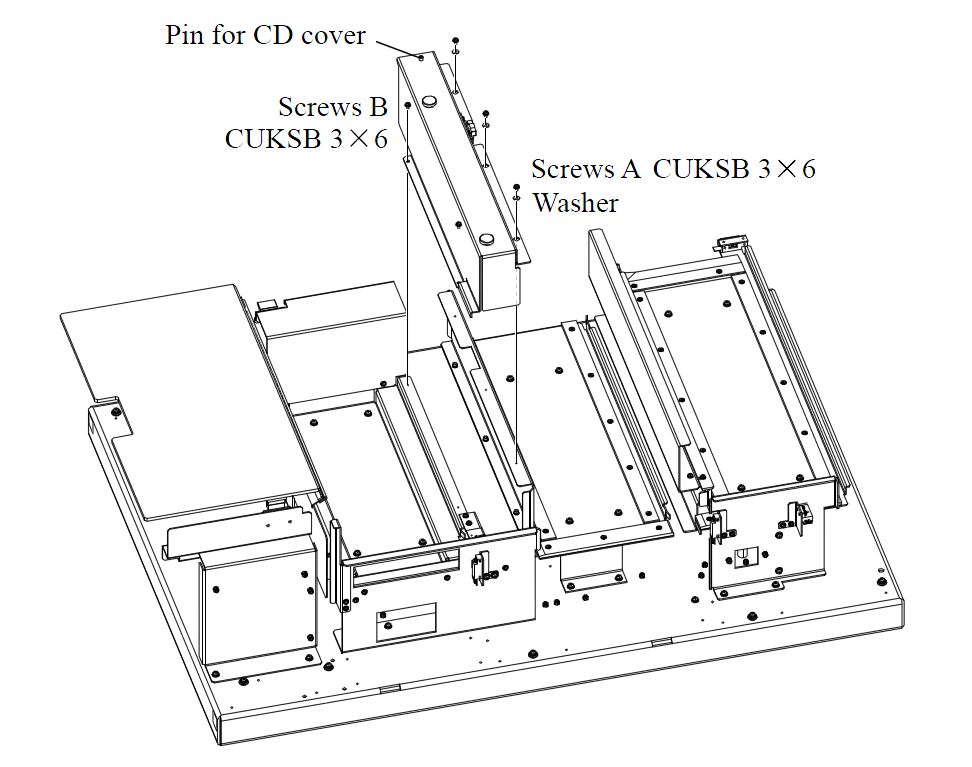
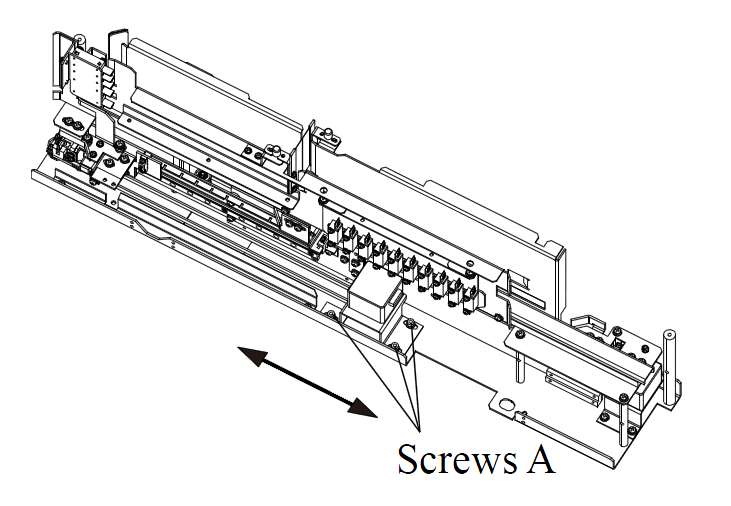
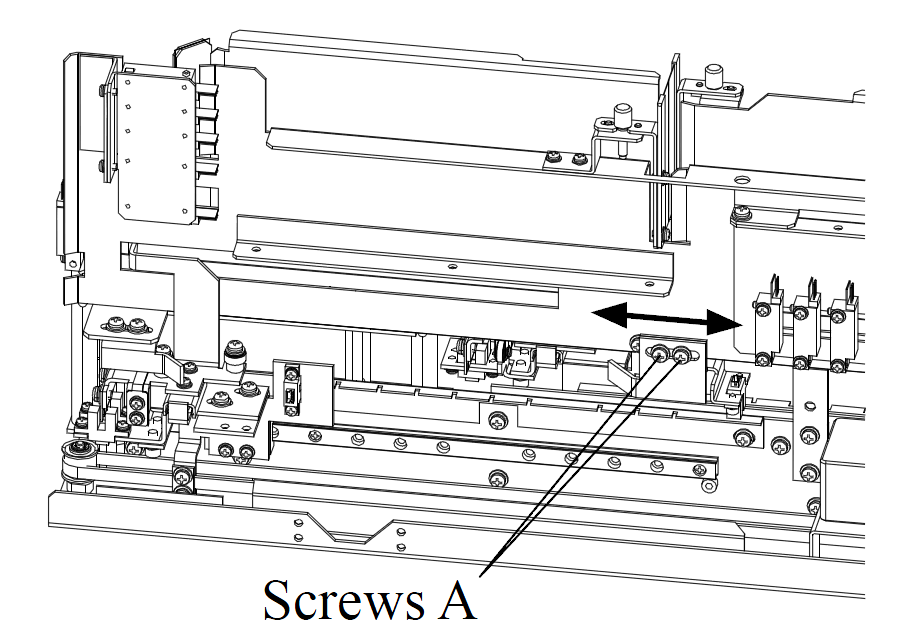
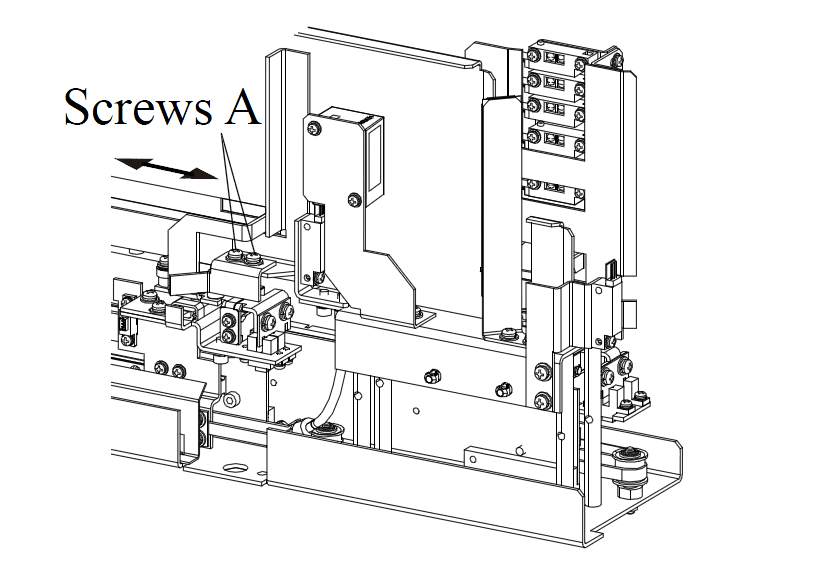
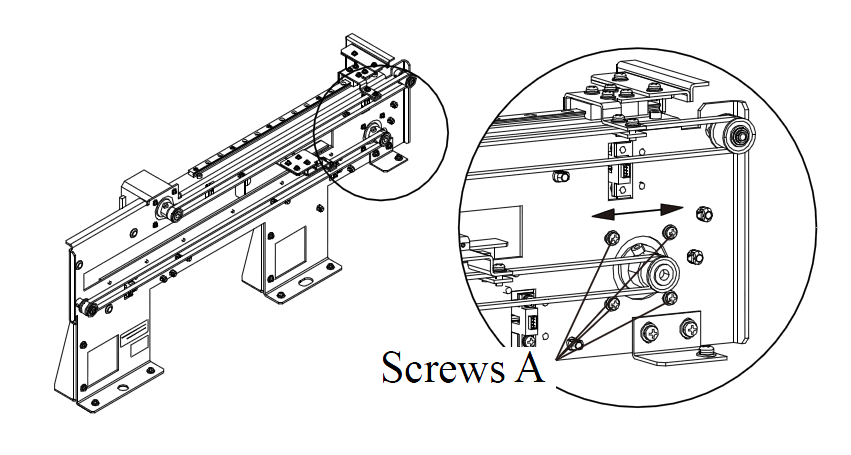
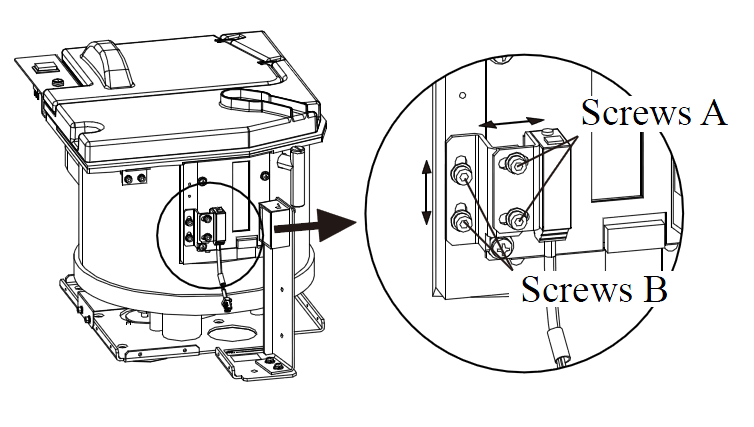
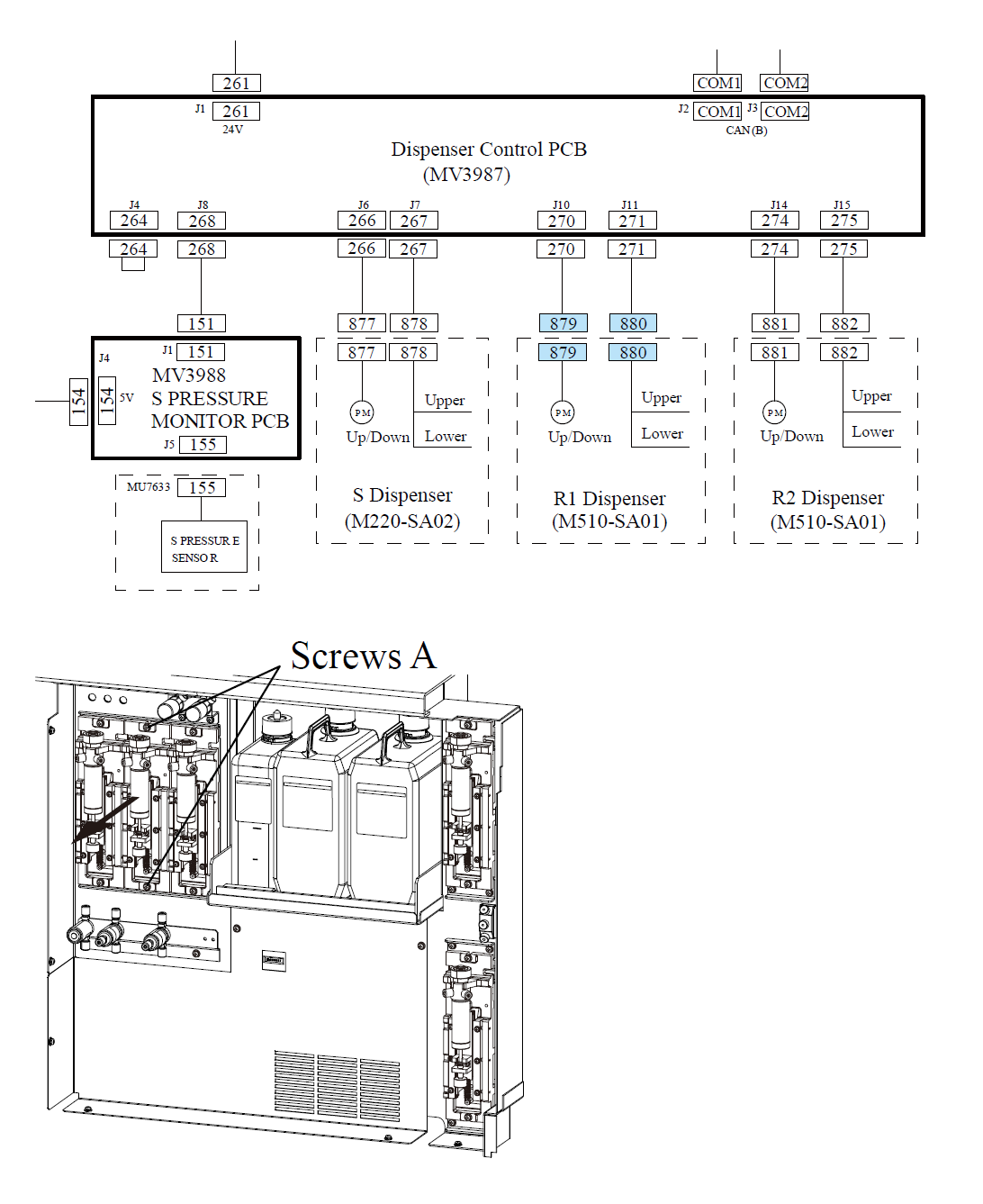
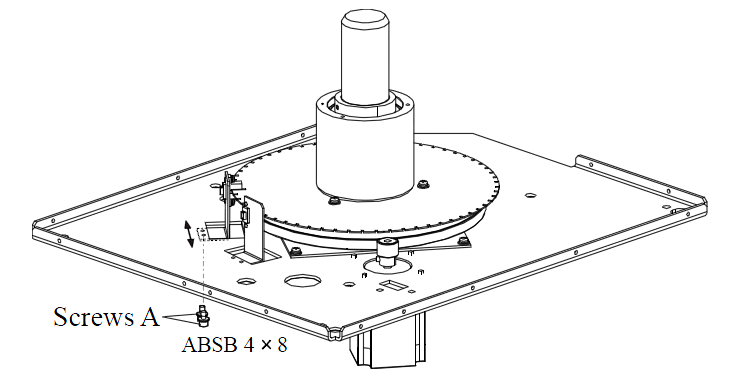
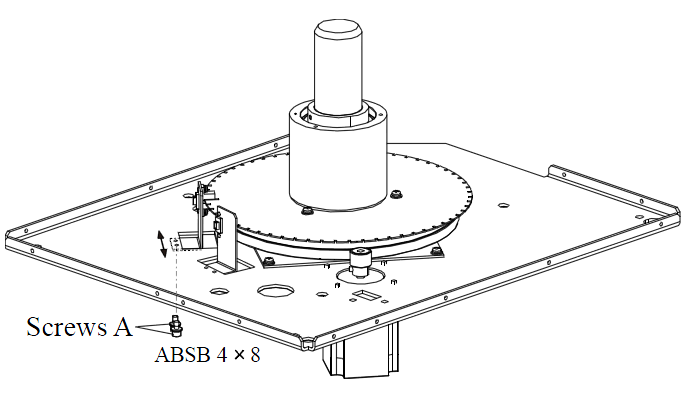
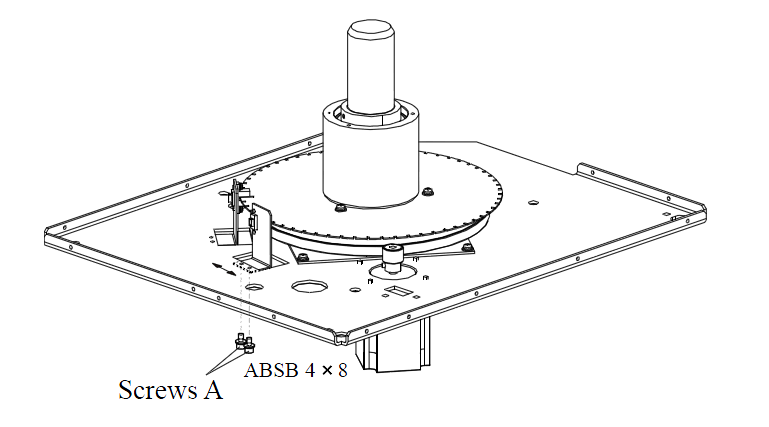
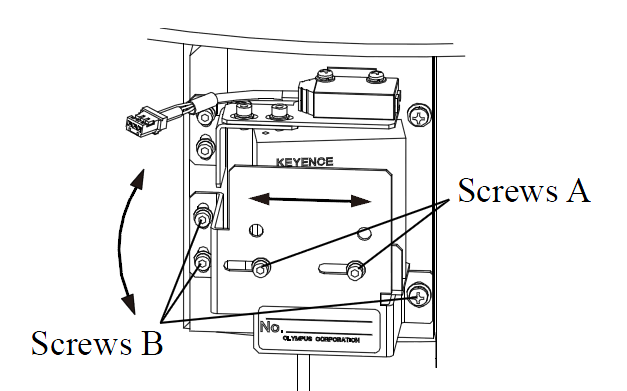
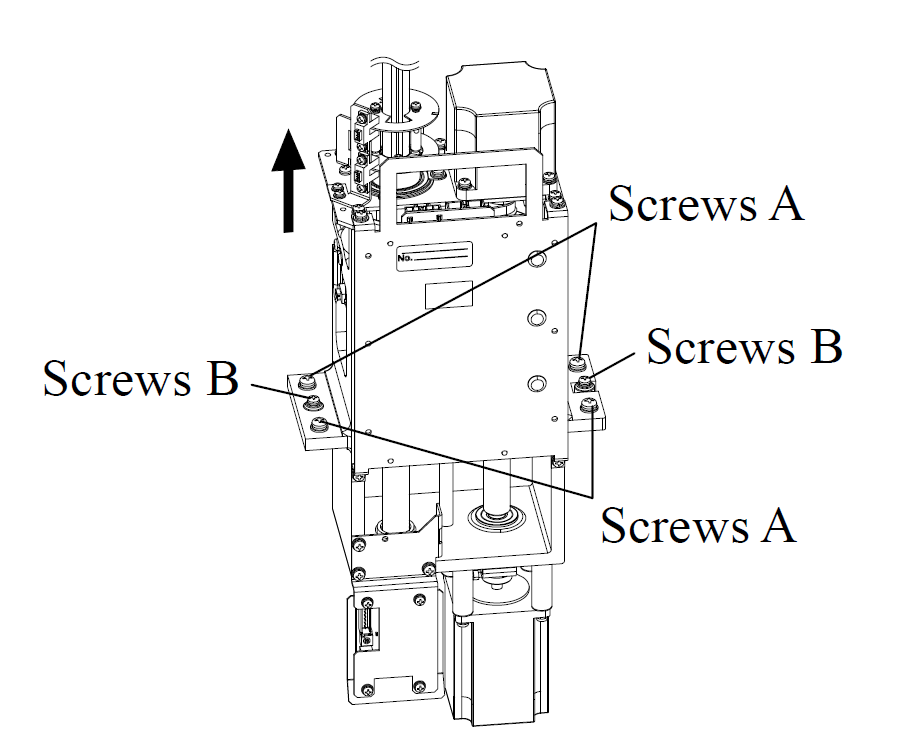
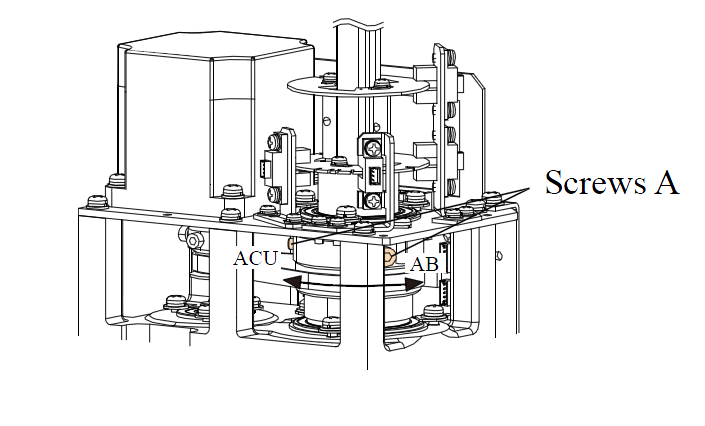
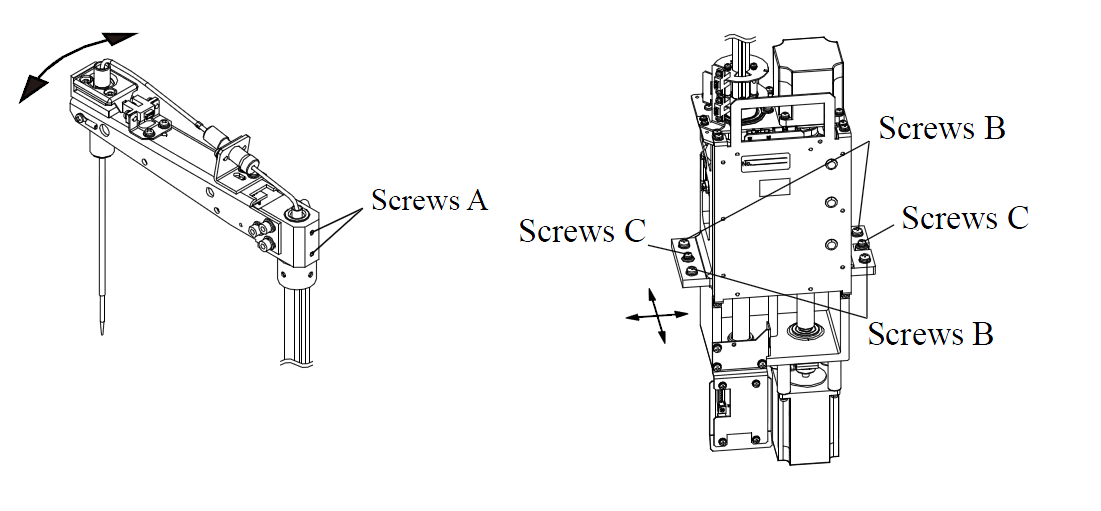
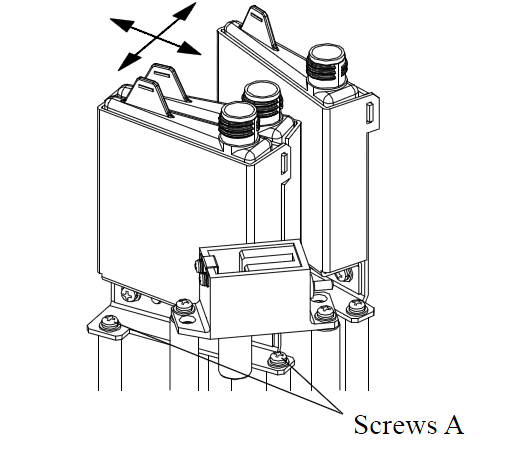
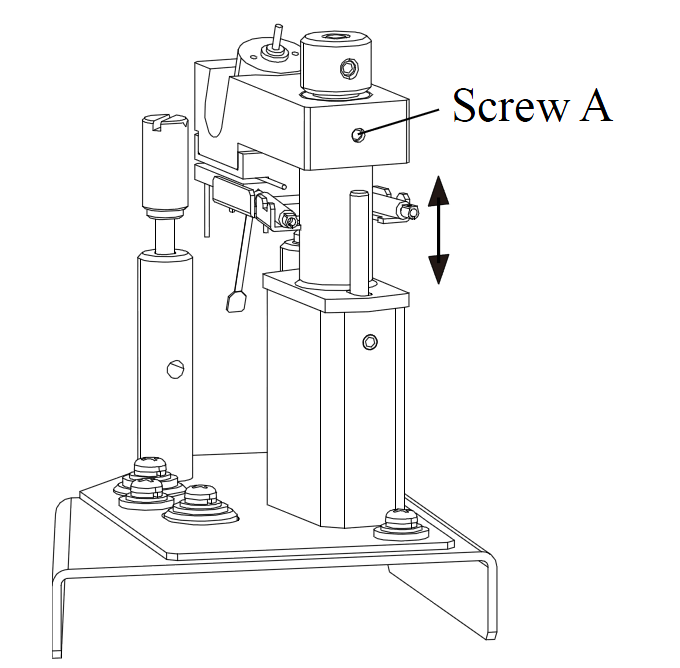
FB单元是冲洗站单元,这个单元的机械部分问题不大,令人讨厌的是它的管路问题,经常发生漫盘。
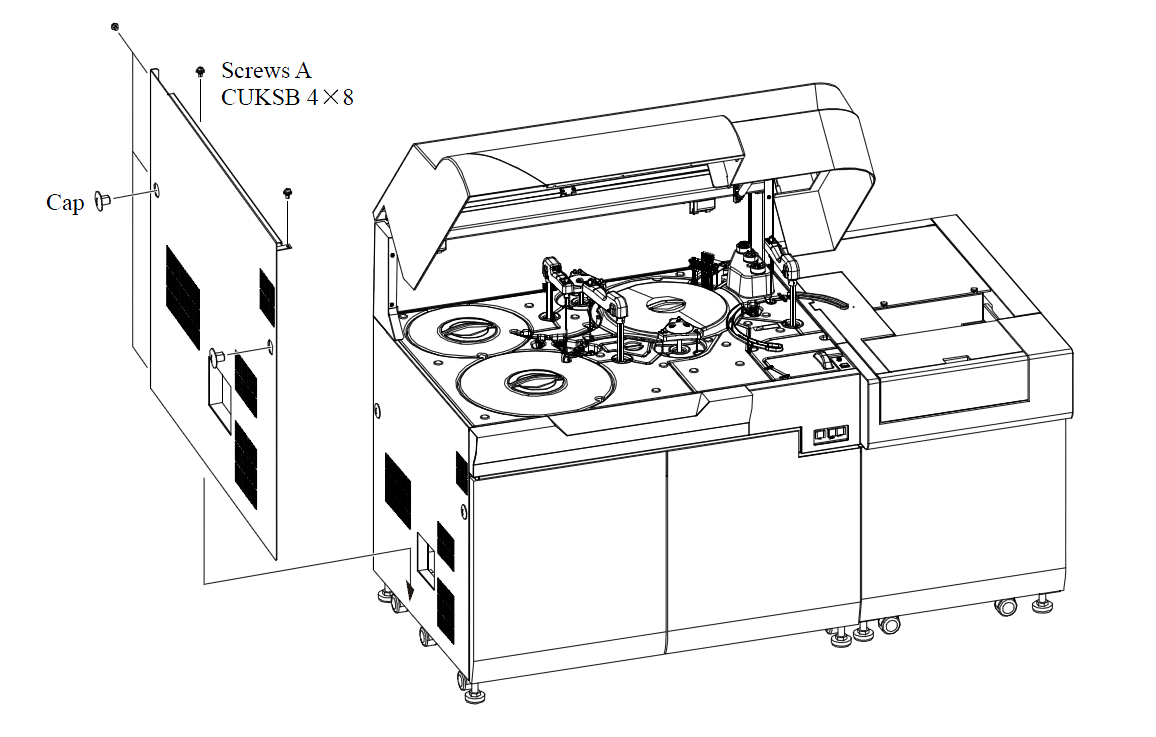
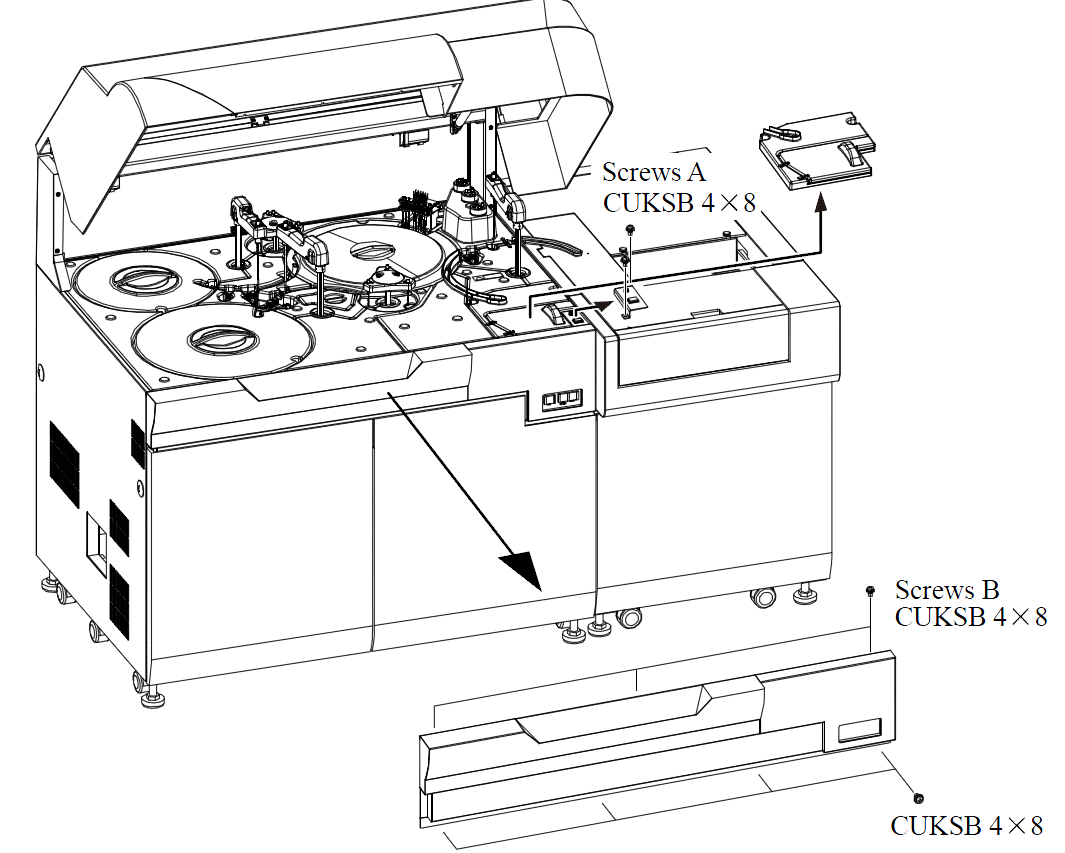
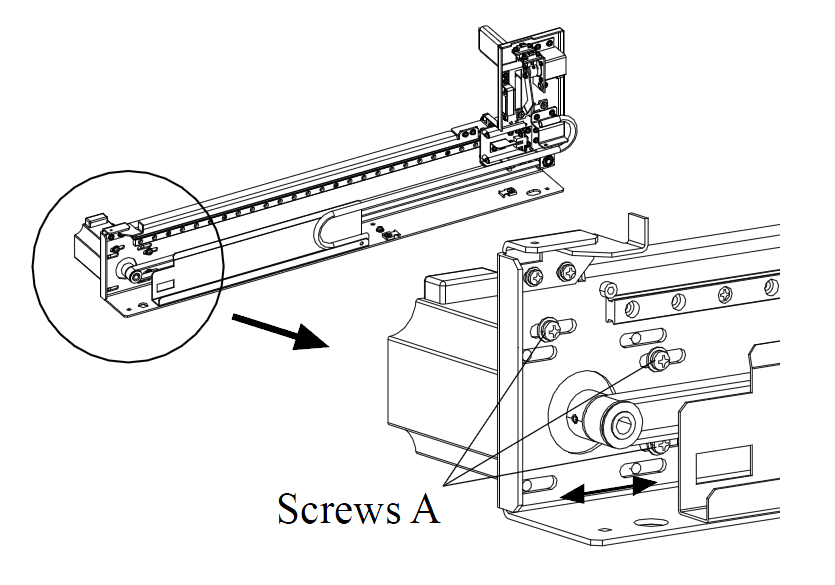
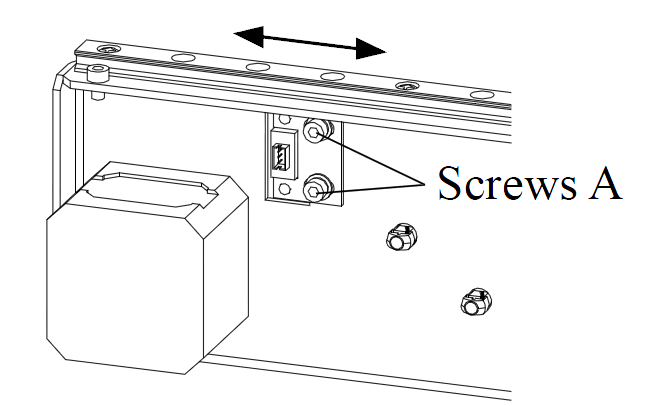
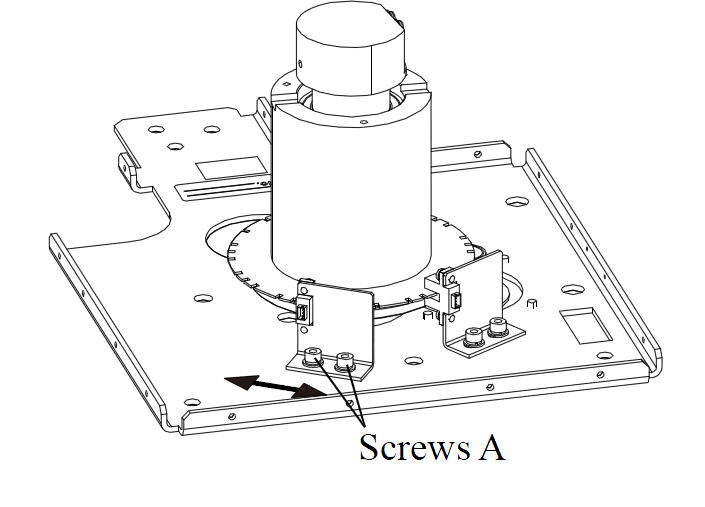
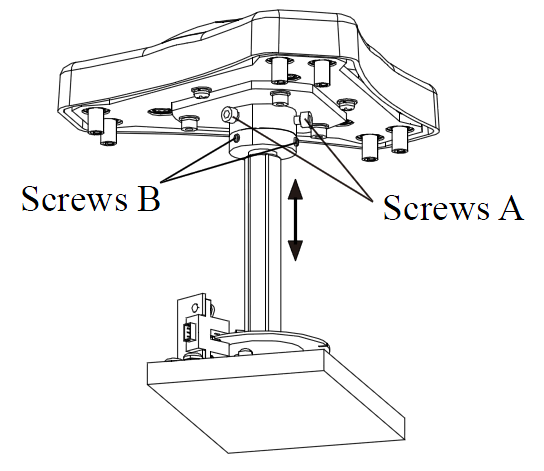
FB单元的拆卸要拆除上盖板和后侧板,拔掉相关的管道和插头。拆卸螺丝A抬出冲洗站,但不要拆卸螺丝B,它们不起固定作用。
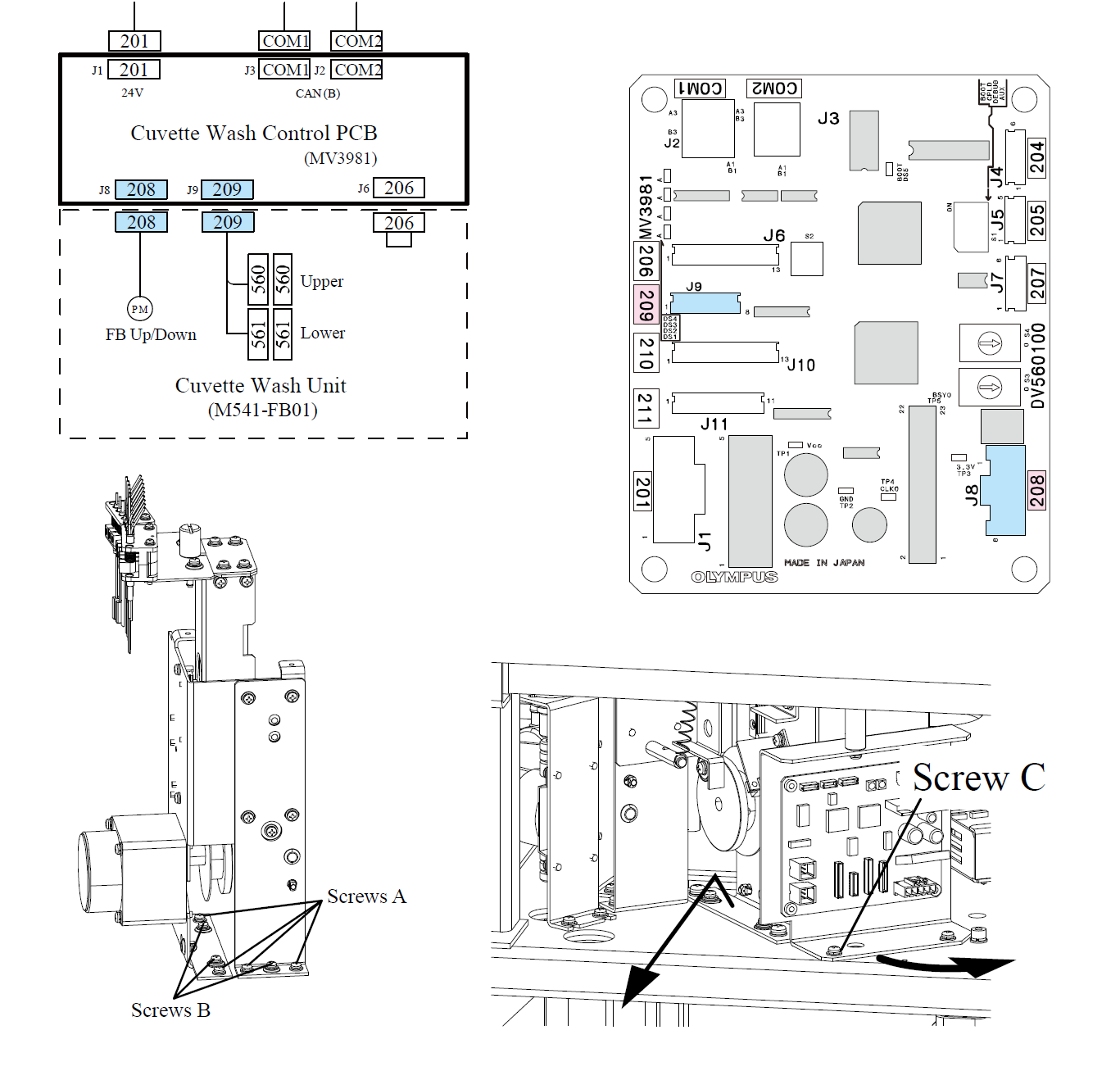
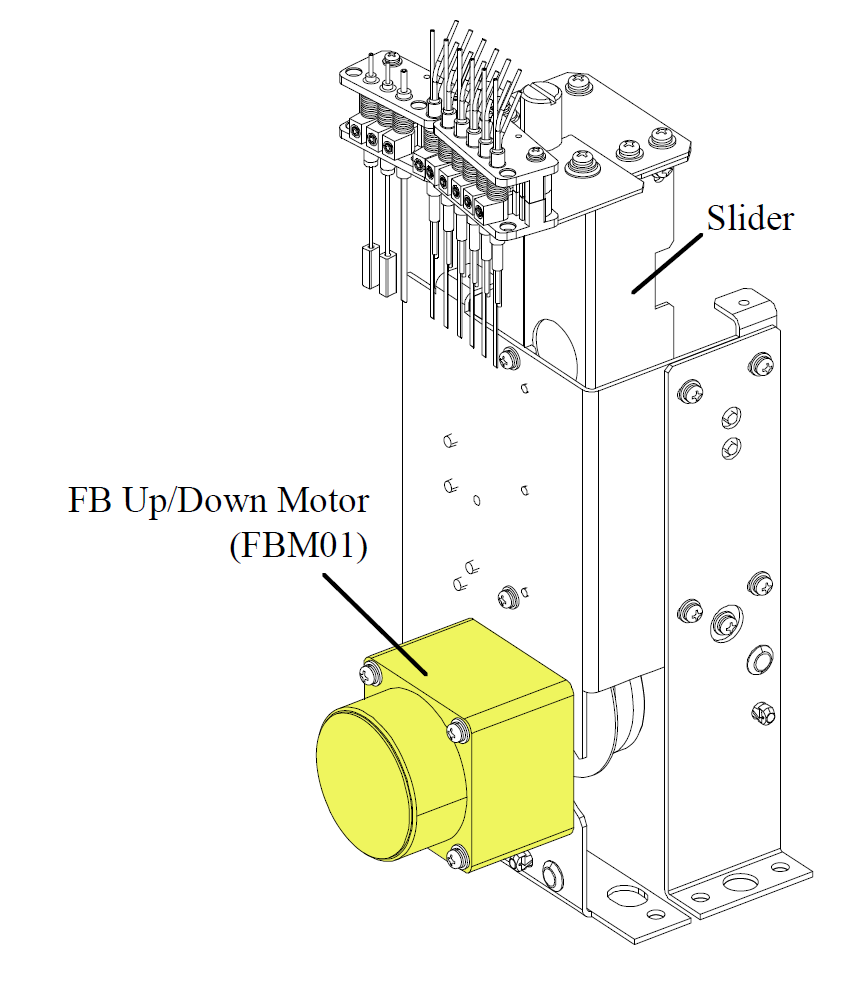 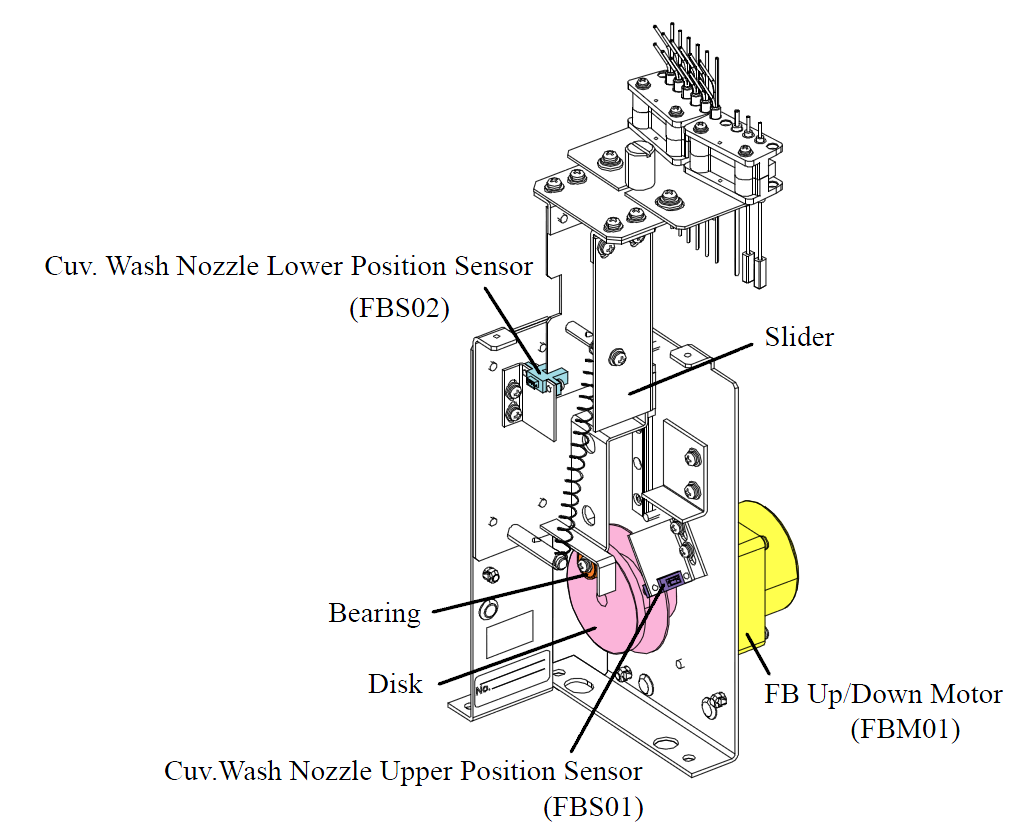
整个FB单元比较简单,马达FBM01带动偏心凸轮,拖动冲洗站针架上下移动,定位依靠上位传感器FBS01和下位传感器FBS02监测。
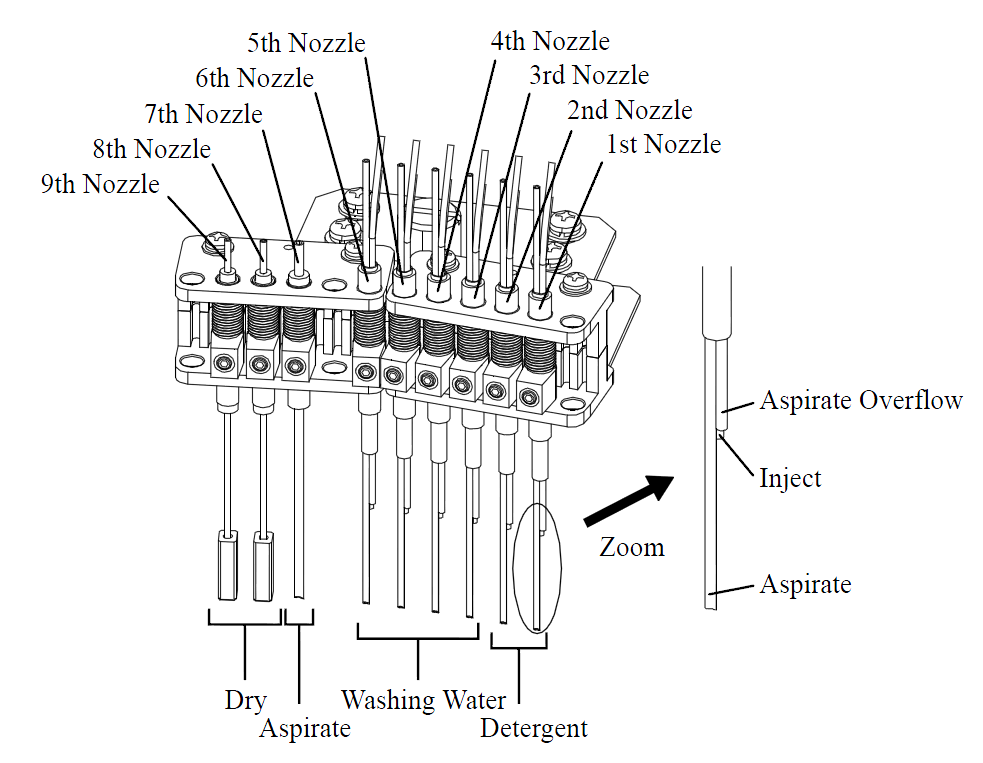
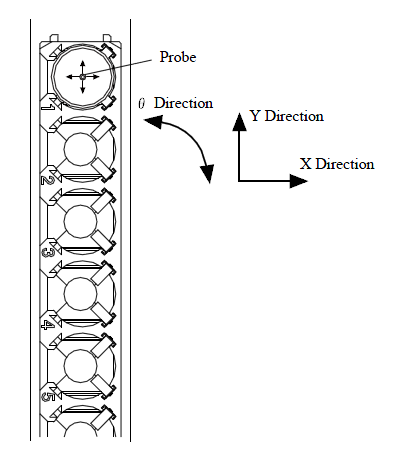
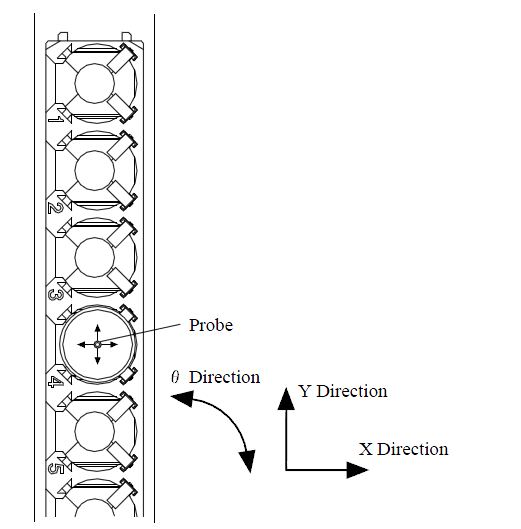
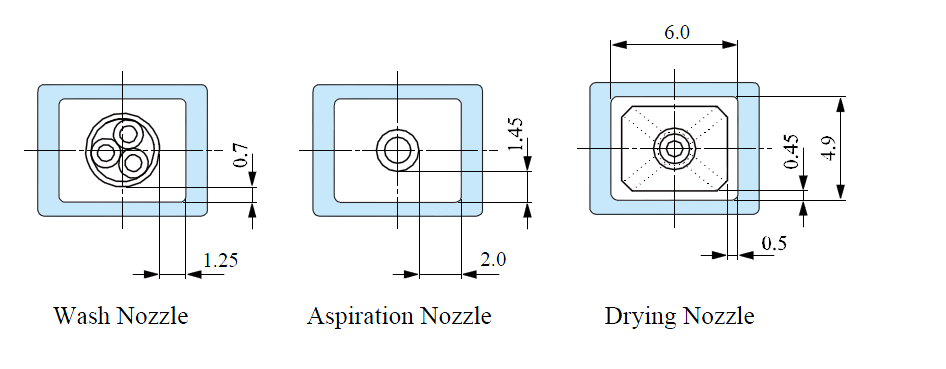
冲洗站的前六根针都是三针组合,一根抽取一个分配去离子水或稀释碱液,另一根是防溢流。
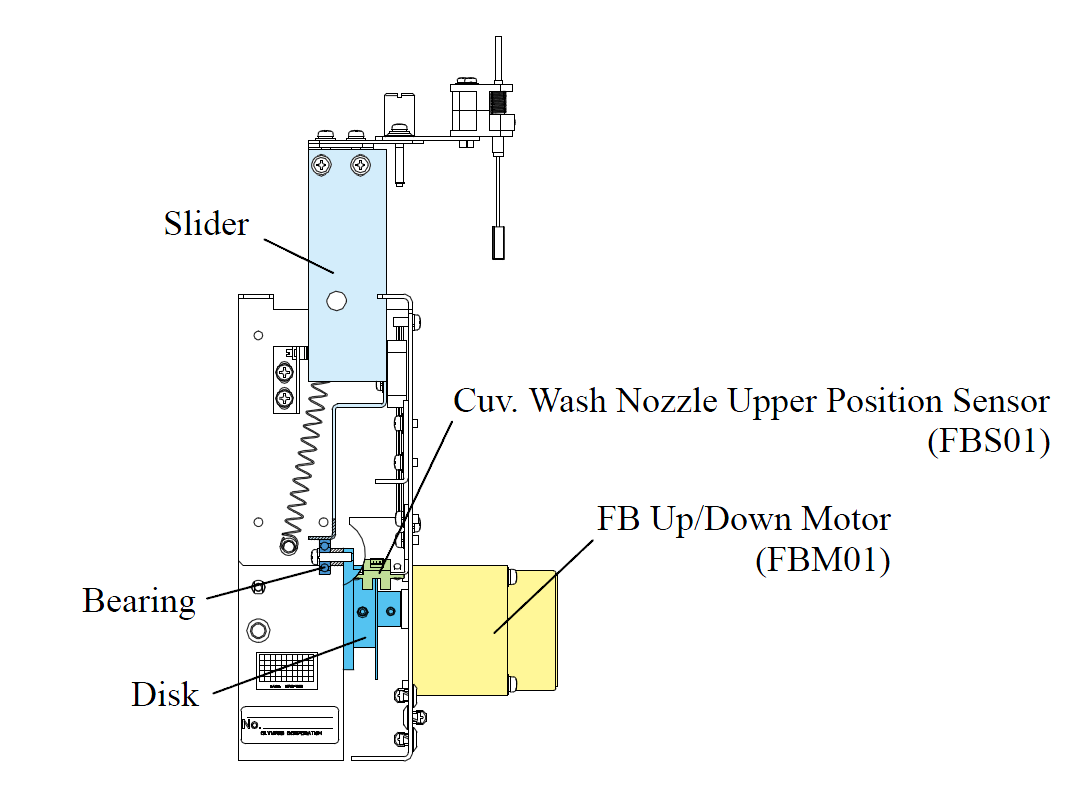
弹簧的作用是保持冲洗站针架的上升下降平稳可靠,不会发生跳动,否则针内液体滴落,会污染下面经过的反应杯。
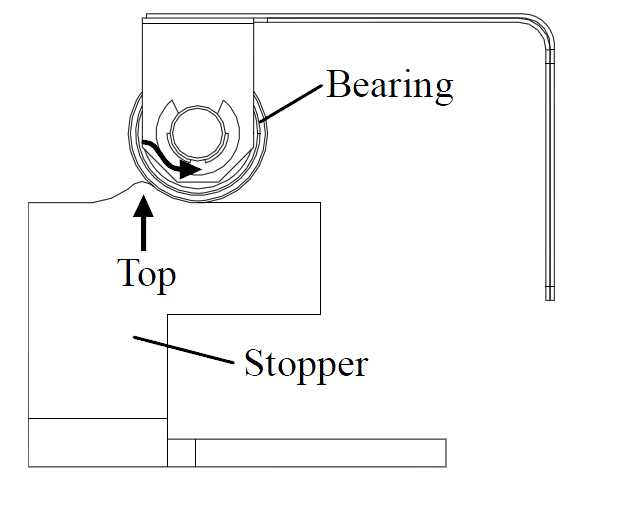
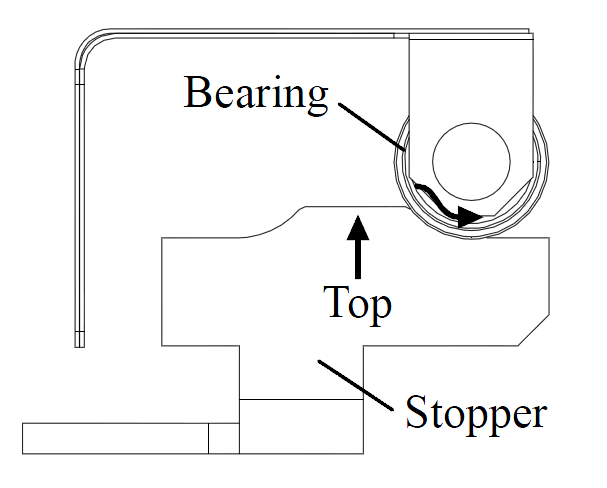
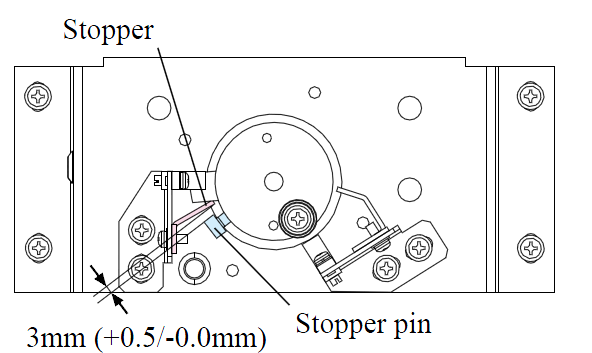
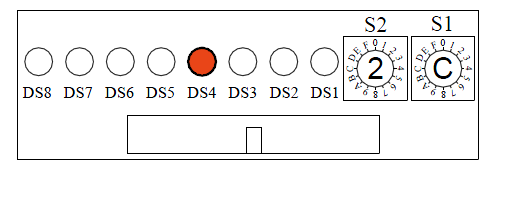
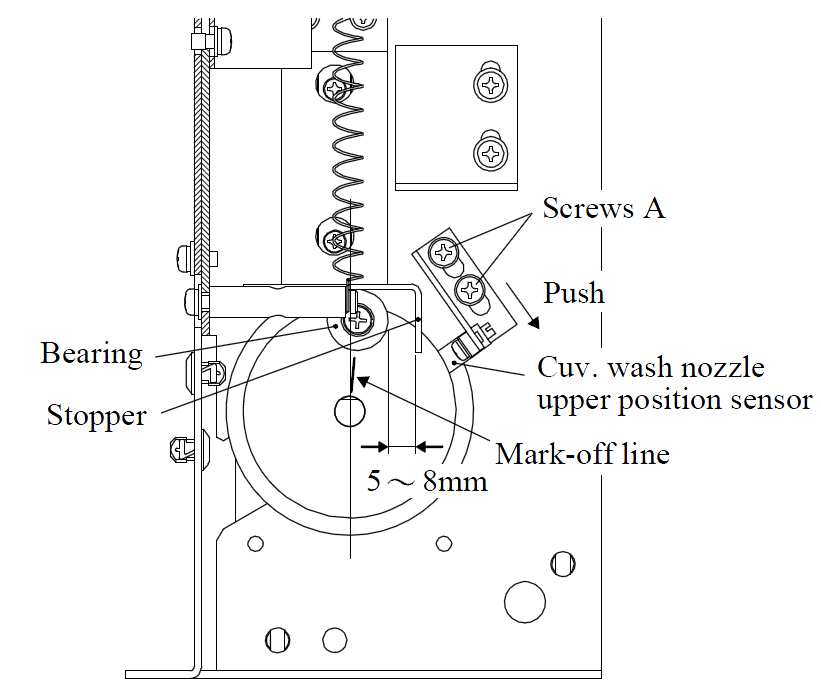
上位传感器的检查调整步骤:
由于冲洗站的上位离开反应杯很高,所以位置不需要那么精确,检查和调整也比较简单。
复位FB单元[ CUVETTE WASH UNIT [FB]/ Reset ]
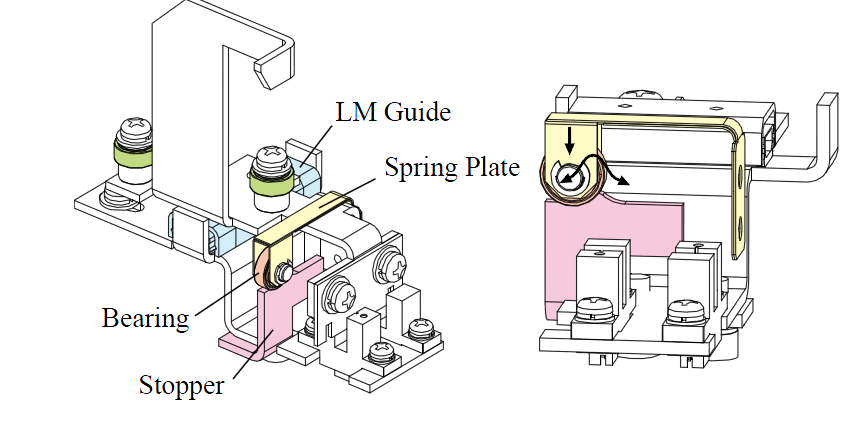
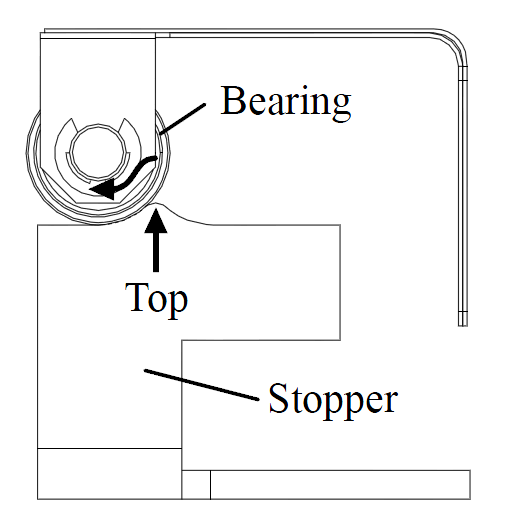
,观察冲洗站的偏心凸轮上的Mark-off
line标记线处于上面的位置,同时轴承Bearing外缘与阻挡器Stopper直接的距离为5-8mm,否则调整上位传感器的位置。
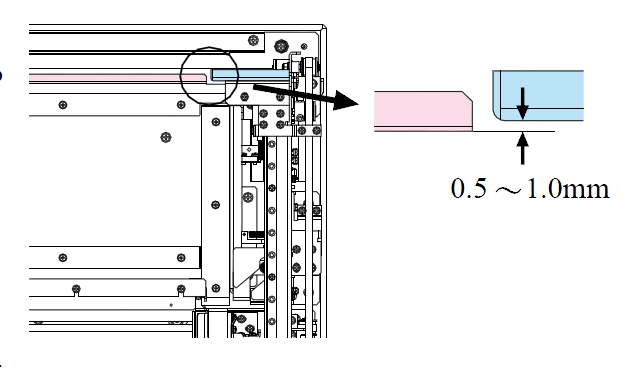
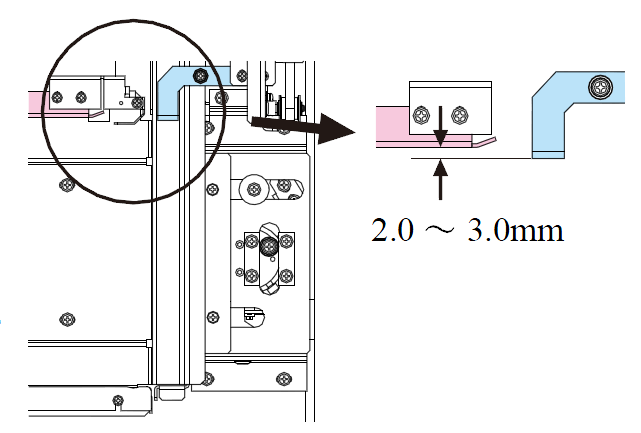
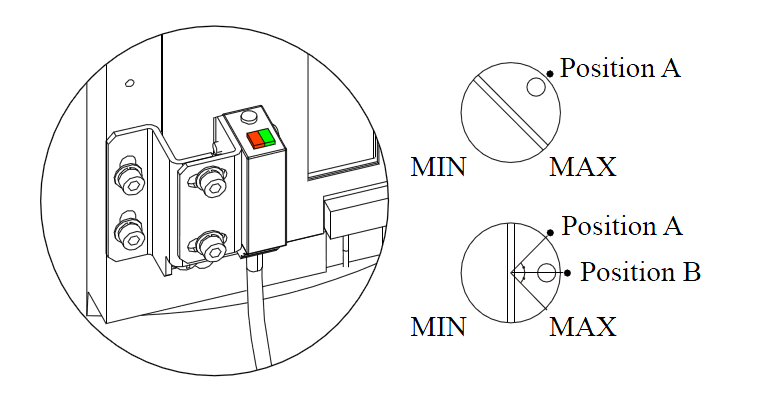
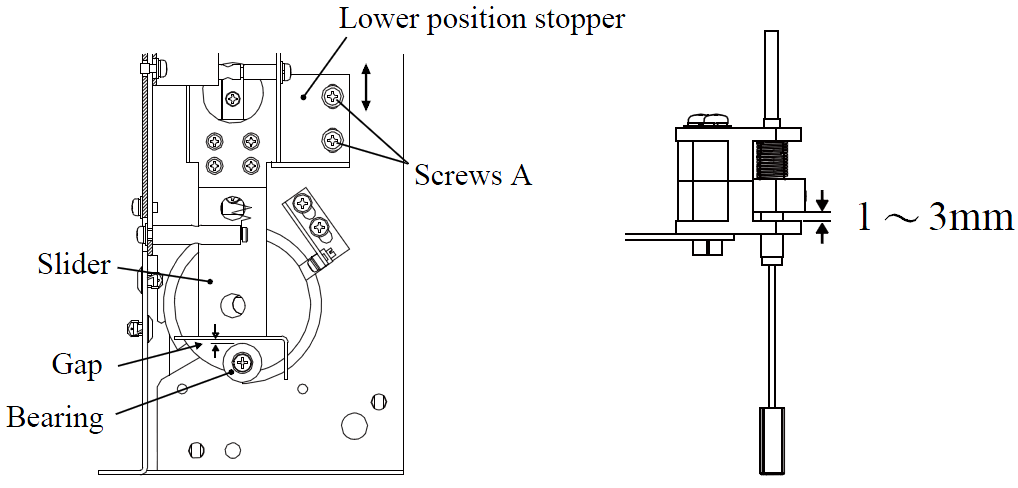
下位传感器的检查调整步骤:
复位FB单元[ CUVETTE WASH UNIT [FB]/ Reset
]接着复位反应盘单元[ INCUBATOR UNIT [GA]/ Reset
],执行冲洗站下降[ CUVETTE WASH UNIT [FB]/ Up-Down
Step
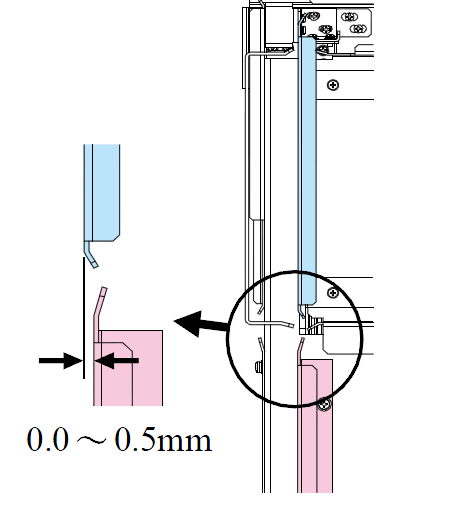
],确认凸轮上的轴承外缘与上挡板之间有一个间隙,没有具体的尺寸,只要有间隙即可。
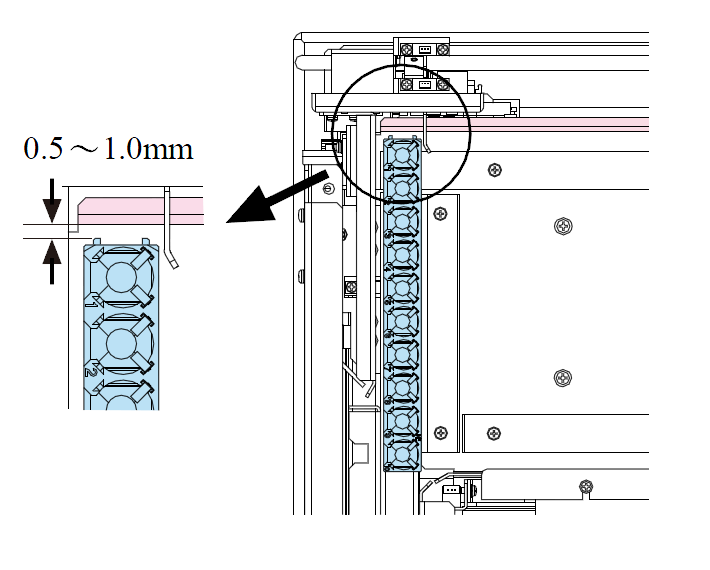
然后观察冲洗站上的干燥棒,由于触及到反应杯底部,上面的弹簧被压缩出一个空间,这个空间的距离为1-3mm。在冲洗站中,两个干燥棒是允许触及到反应杯底部的,其它7根针是不允许的,所以冲洗针上的有弹簧装置,防止撞击反应杯底部造成破损。这个间隙的检查就是为了防止其它针撞到杯底而采取的间接观察方式。但间隙太大,针尖离反应杯底太远,会造成抽吸不干净,吐出液体时喷溅产生大量泡沫。
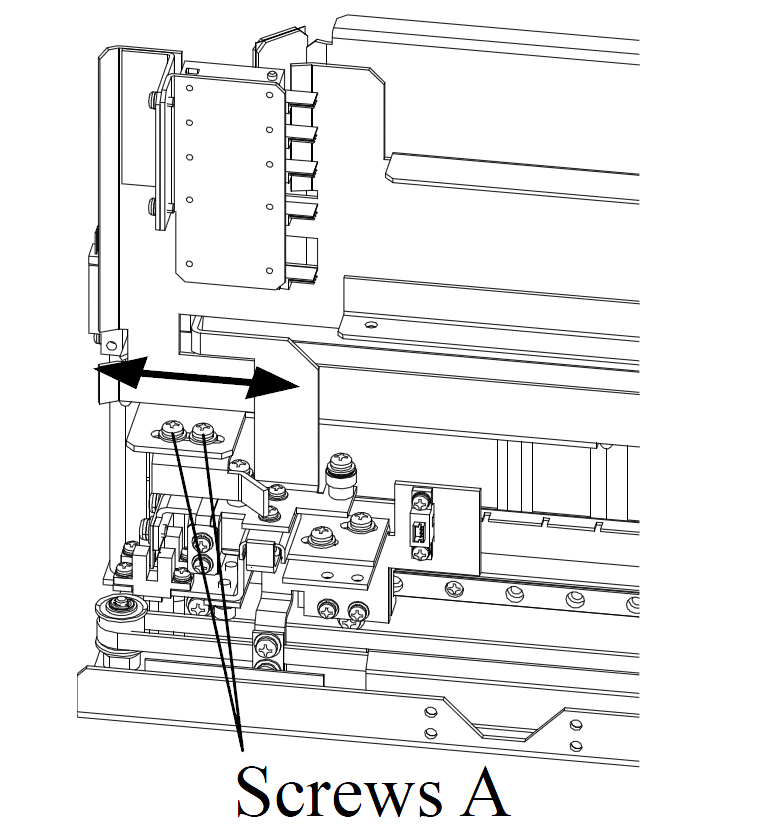
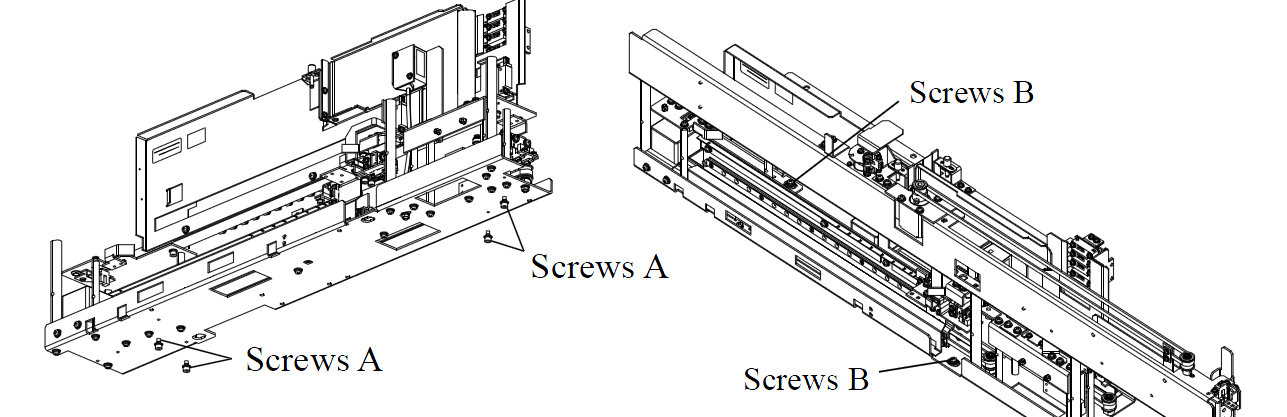
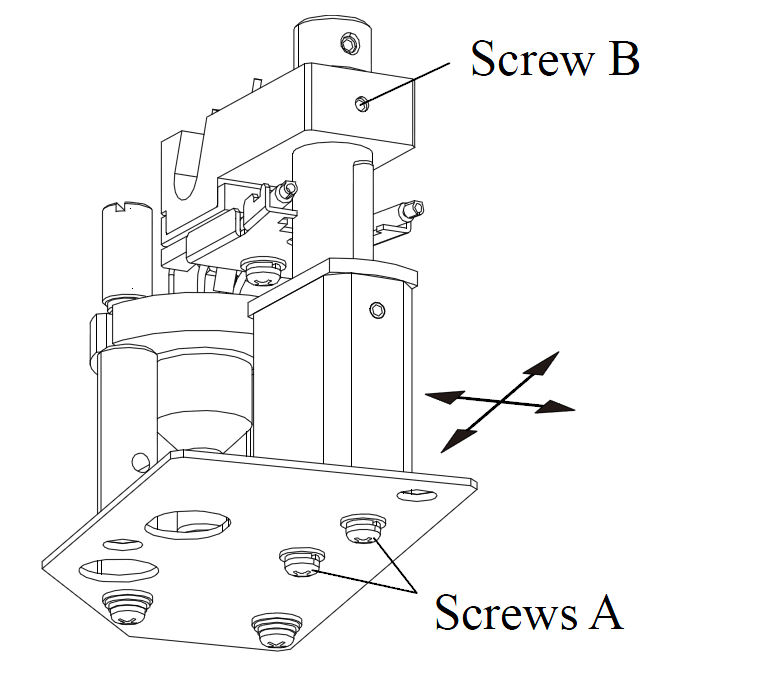
间隙不正确,需要调整冲洗站针架的垂直固定位置螺丝B或者调整下位传感器的位置螺丝A。
 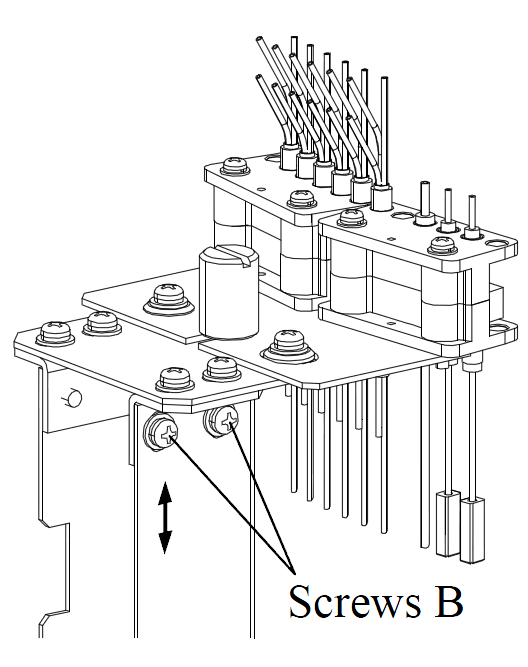
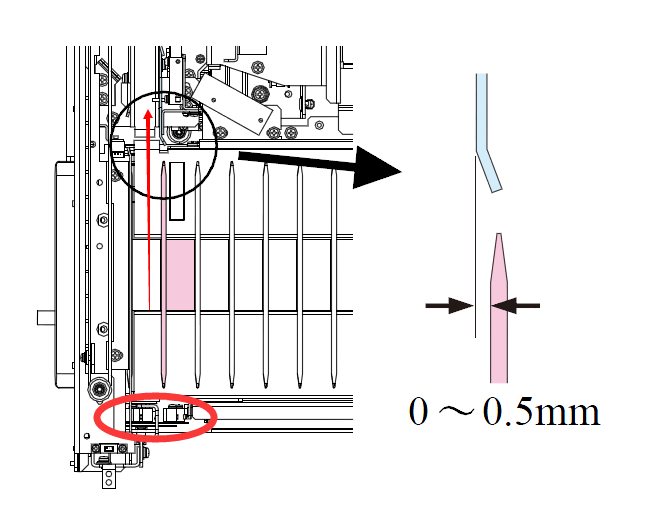
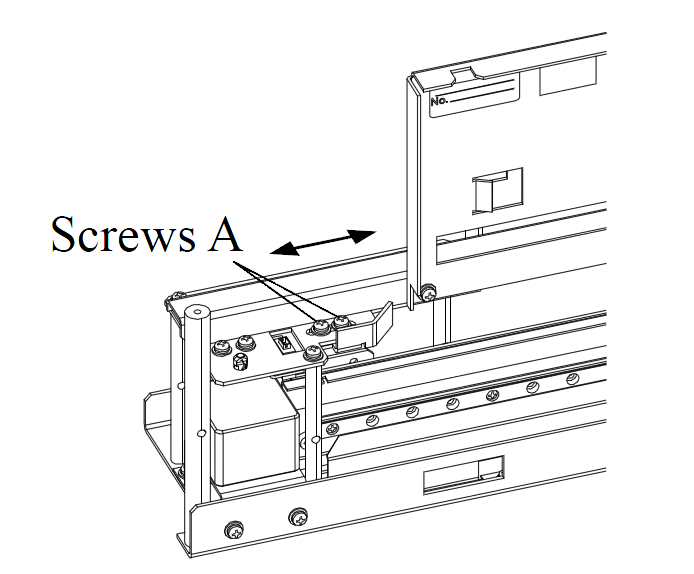
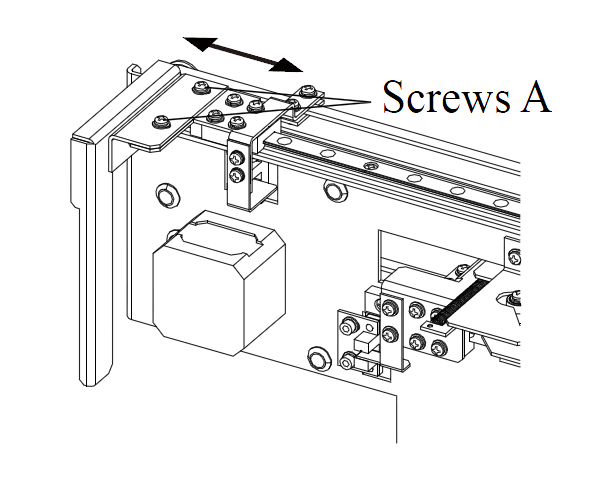
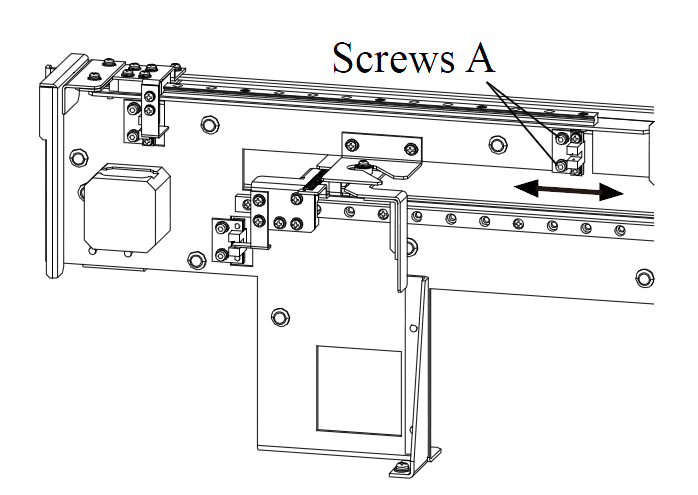
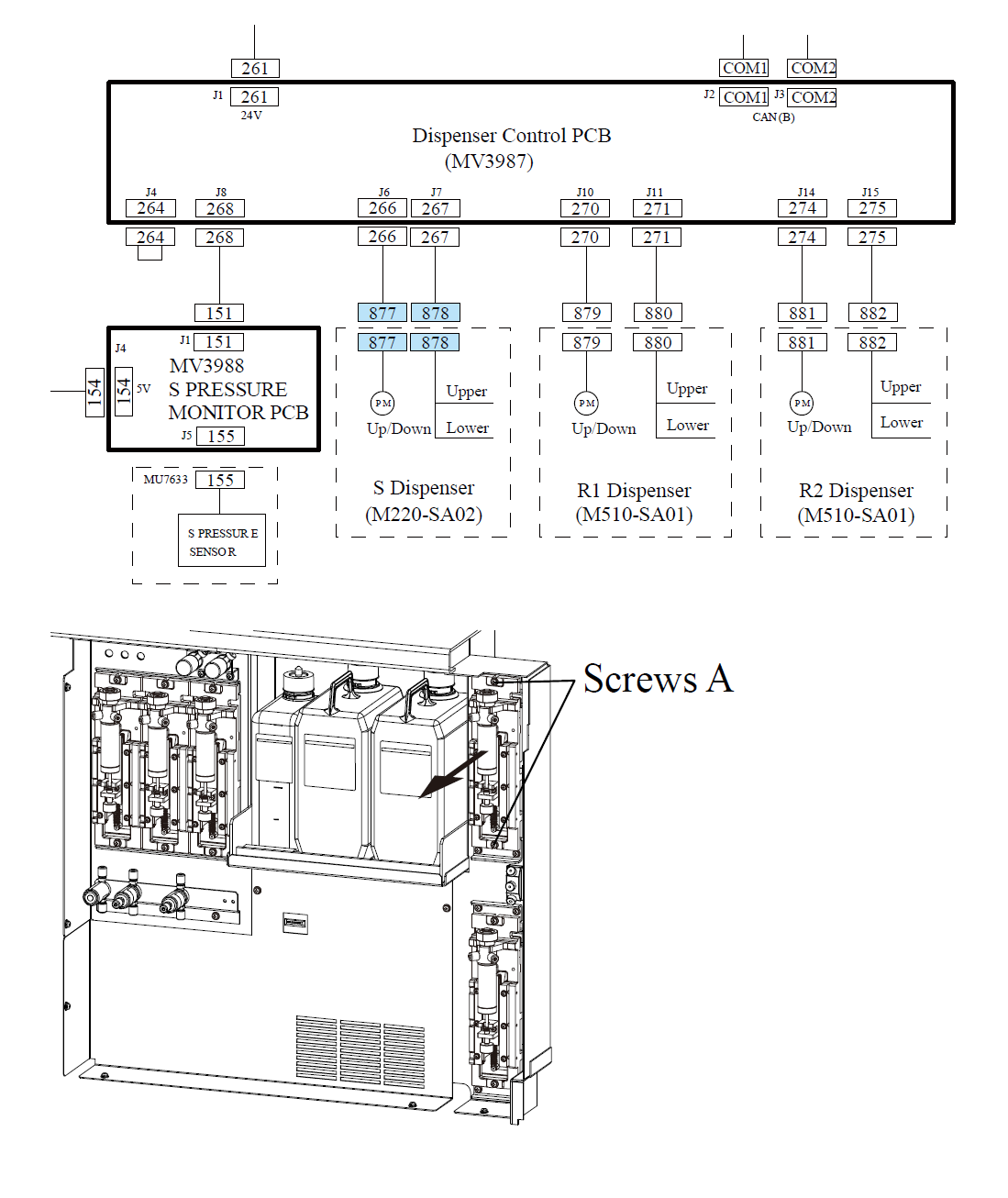
冲洗站各针在反应杯位置的检查和调整步骤。
复位冲洗站和反应盘[ CUVETTE WASH UNIT [FB]/ Reset ],[
INCUBATOR UNIT [GA]/ Reset ],执行冲洗站下降[
CUVETTE WASH UNIT [FB]/ Up-Down Step
],观察三针、单针和干燥棒都在反应杯的正中心。
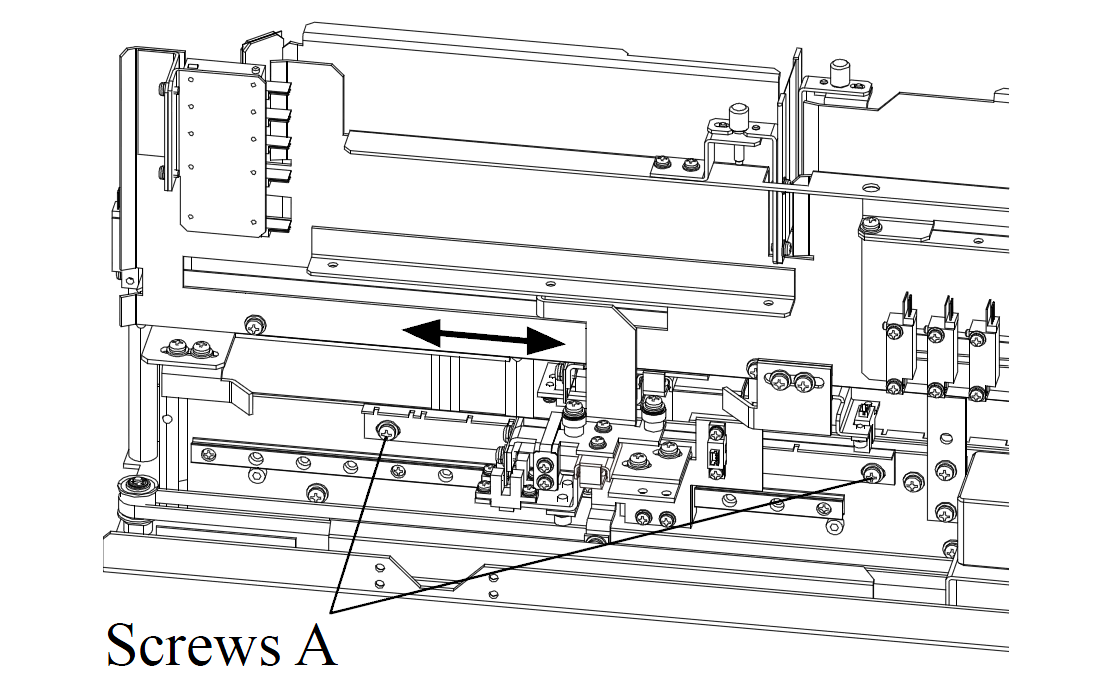
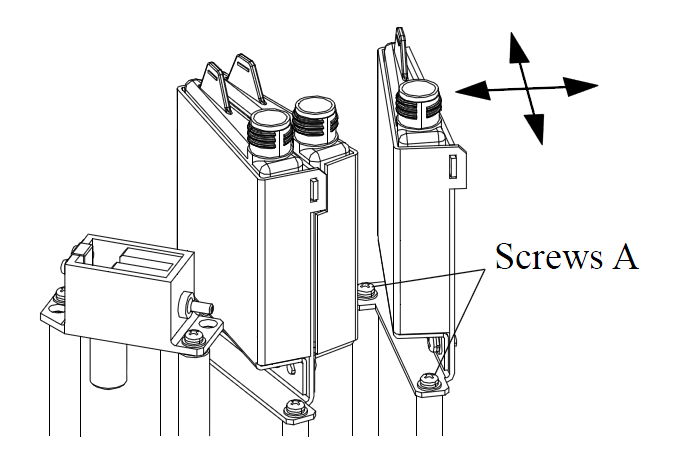
由于冲洗站呈扇形安装,前六根针和后三根针分别在两块支撑板上,如果反正成组的偏差,可以调整这组支撑板的位置(螺丝A)。如果单独一根针发生偏差,那是针折弯扭曲了,捋顺即可。如果九根针整体发生偏差,就要调整总支撑板的位置(螺丝B)。
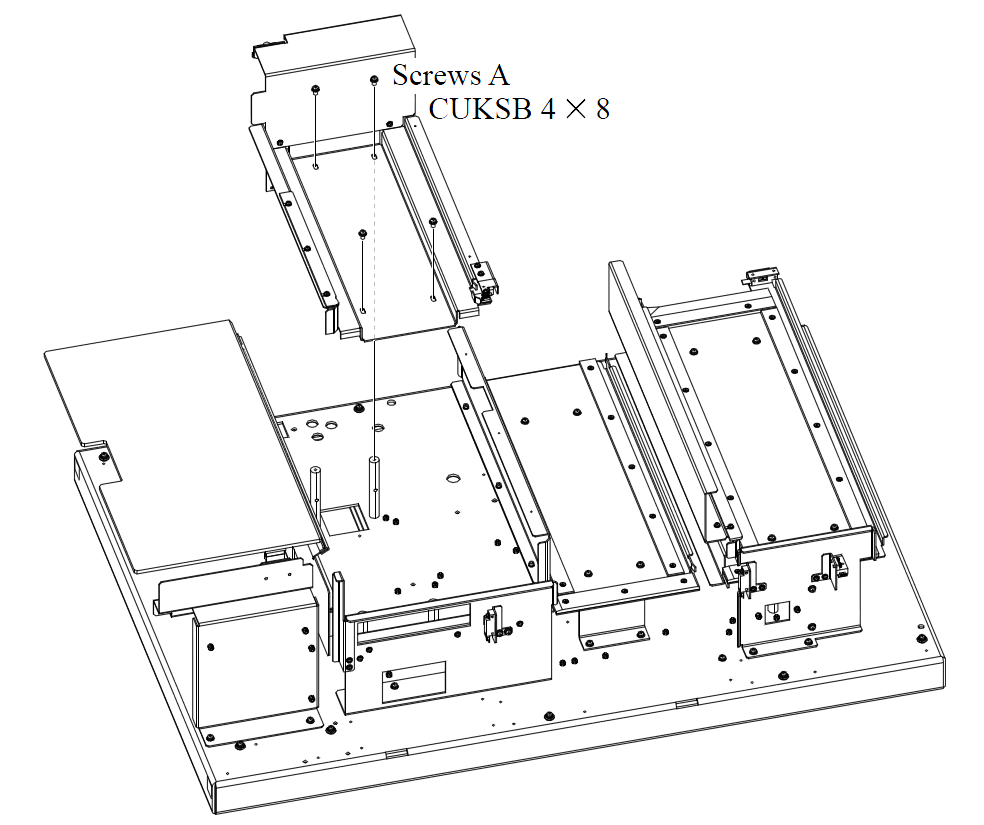
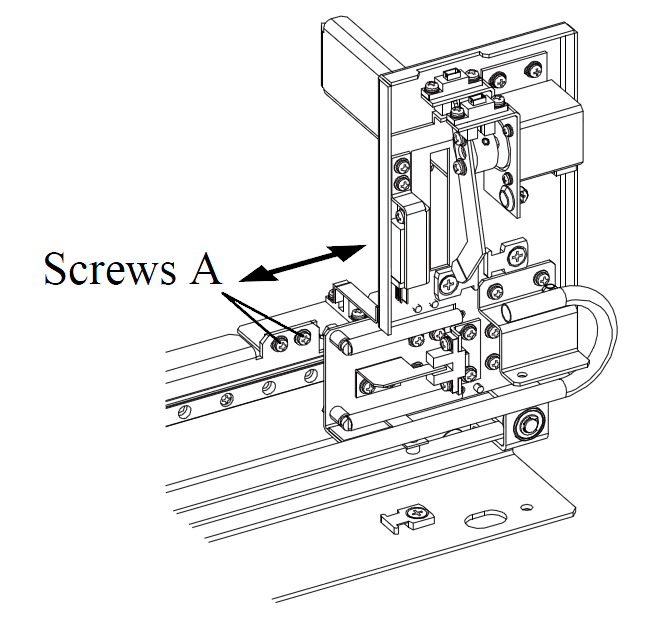
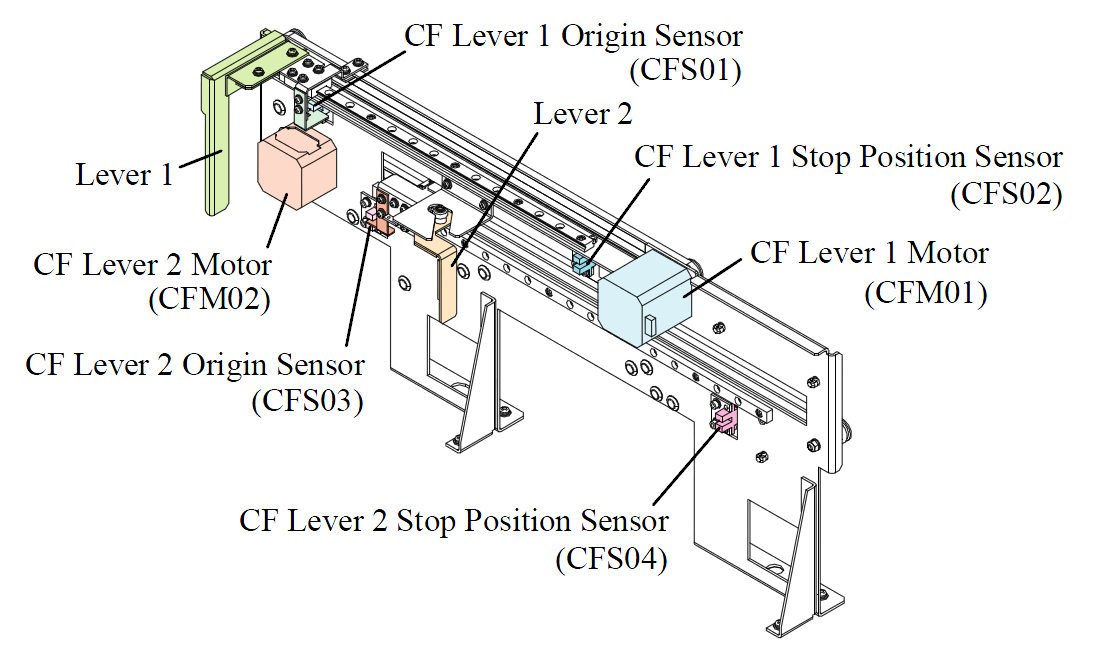
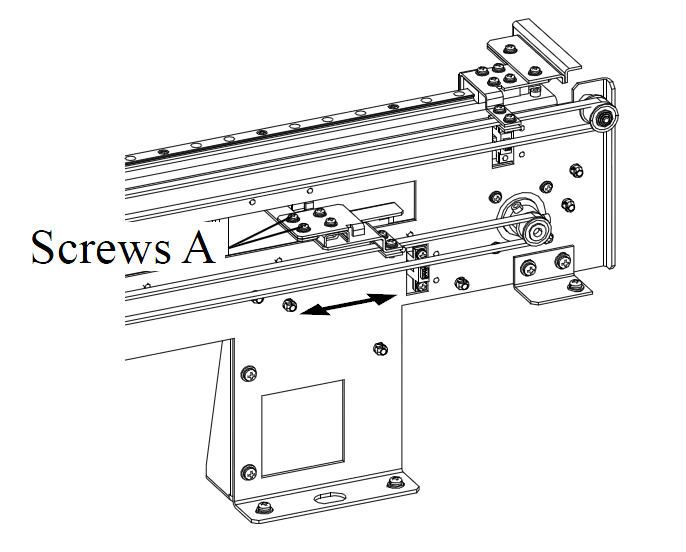
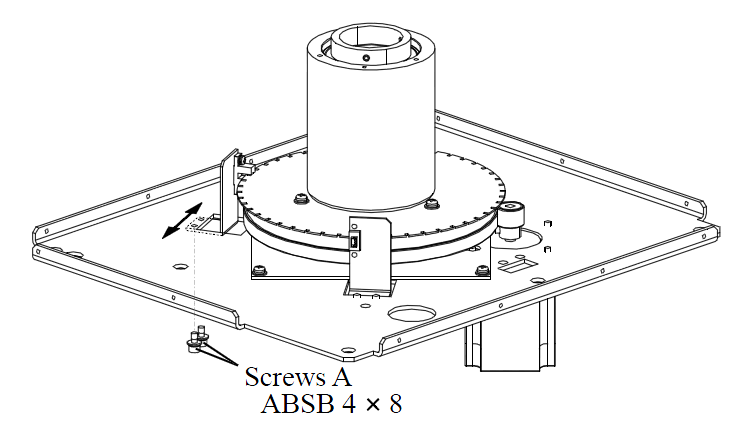
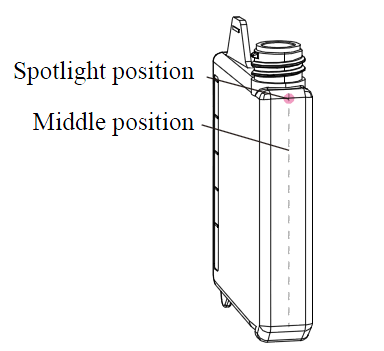
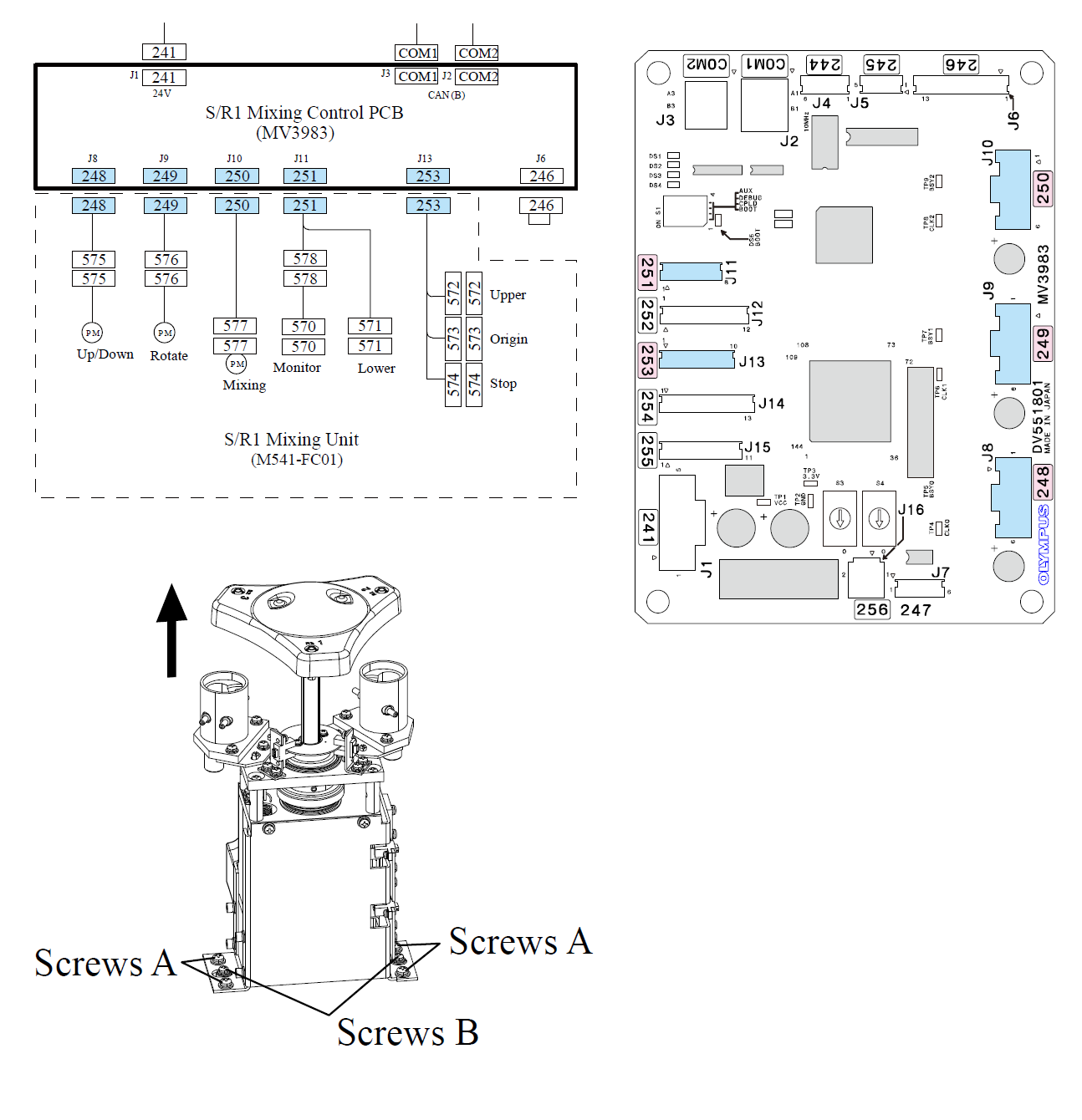
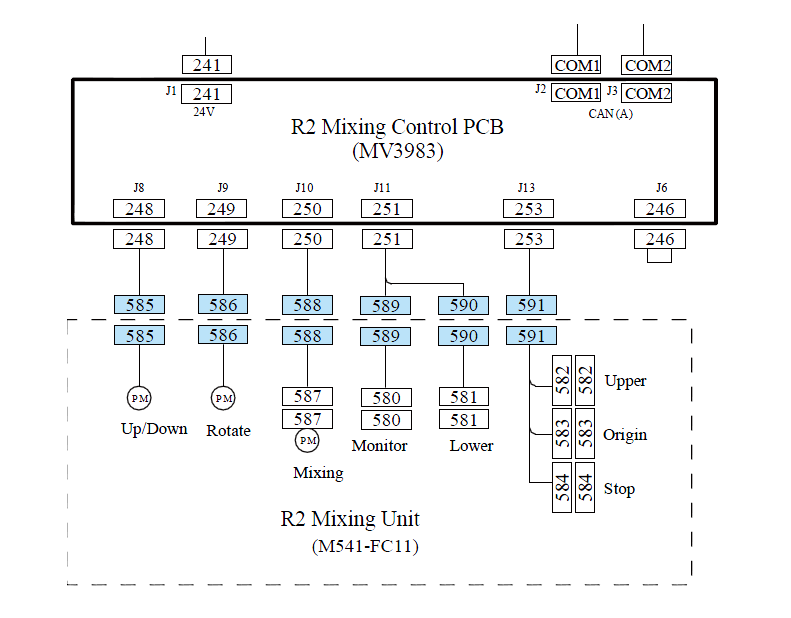
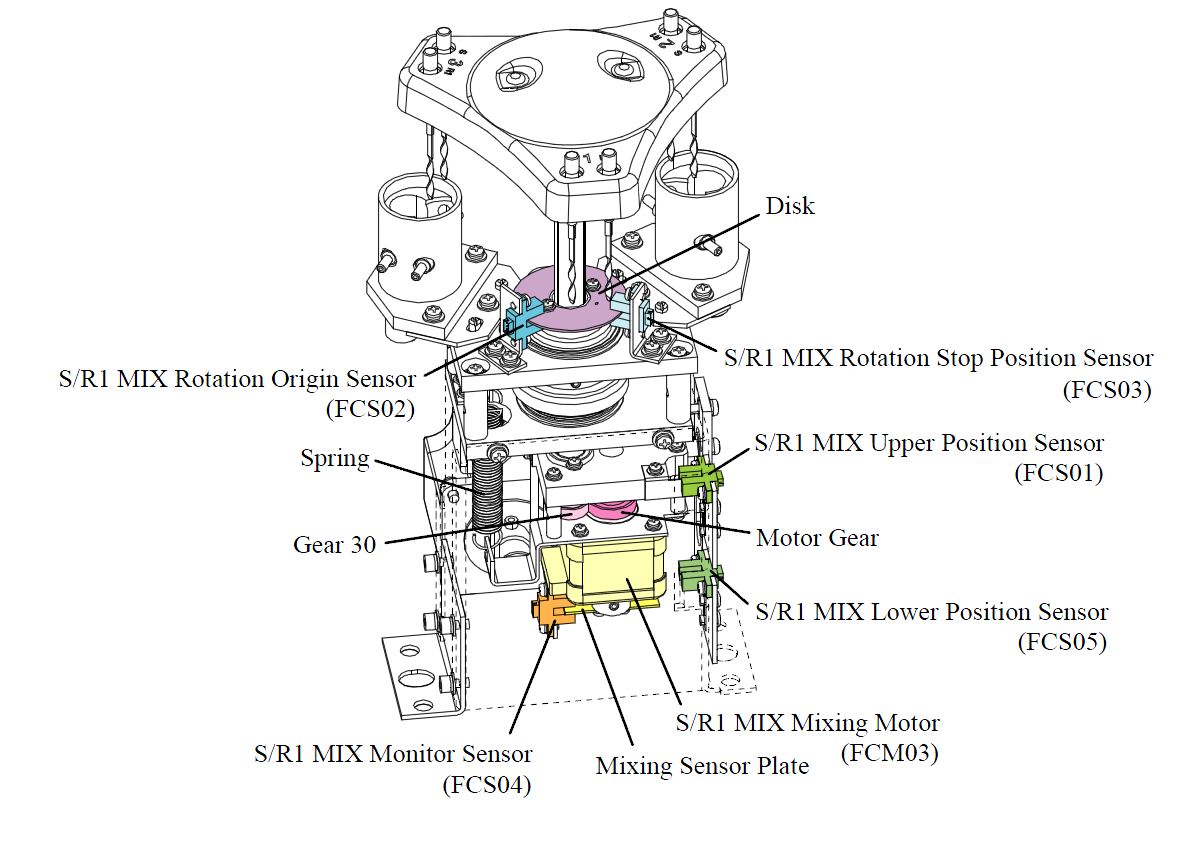
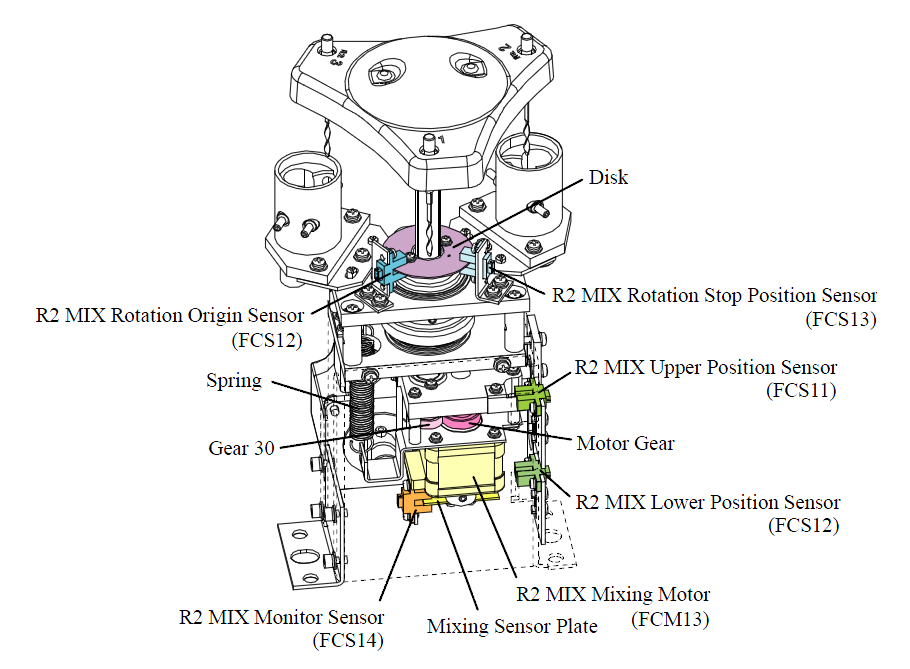
FC单元是搅拌站单元,分位FC01和FC11,二者结构完全一样。但FC01带有两组搅拌棒,分别是R1和S,而FC11只有一组搅拌棒R2.FC单元都有三套完全一样的搅拌棒,其中一套位于反应杯上方(或反应杯内搅拌),另一组在稀释碱液冲洗池上方(或下降到稀释碱液冲洗池内清洗),还有一组在去离子水冲洗池的上方(或下降清洗)。
搅拌棒以前都是螺旋式的,现在新的机型R2改为直杆凹面的L型搅拌棒。搅拌棒表面涂有不沾图层,一旦破损就需要更换,不然交叉污染。
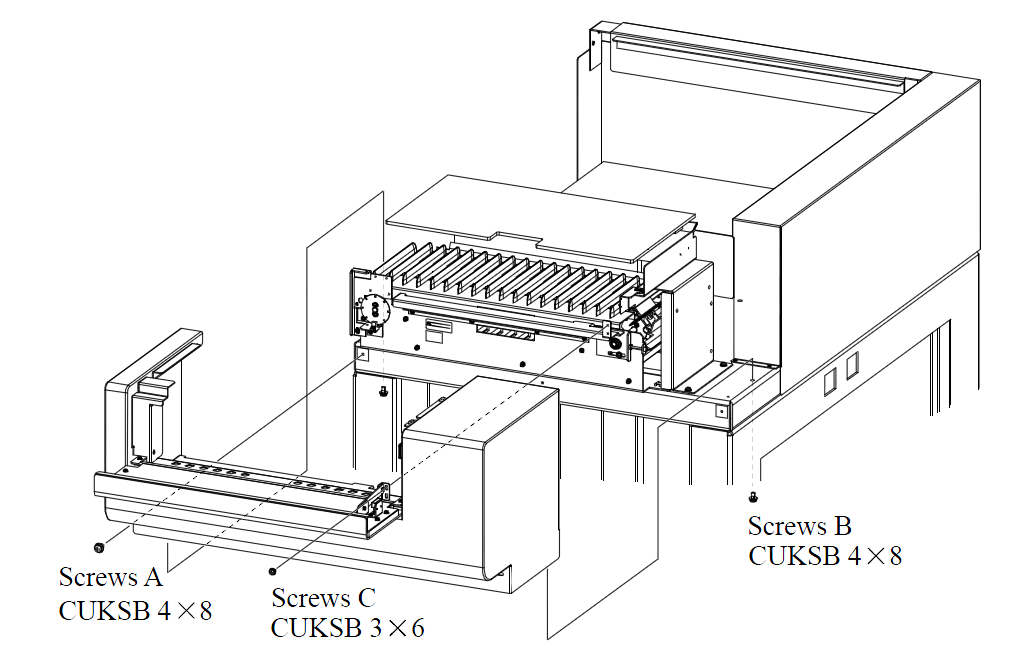
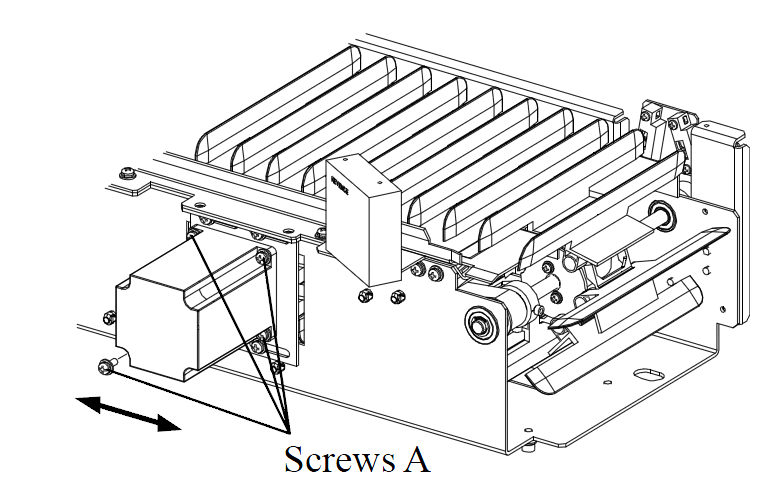
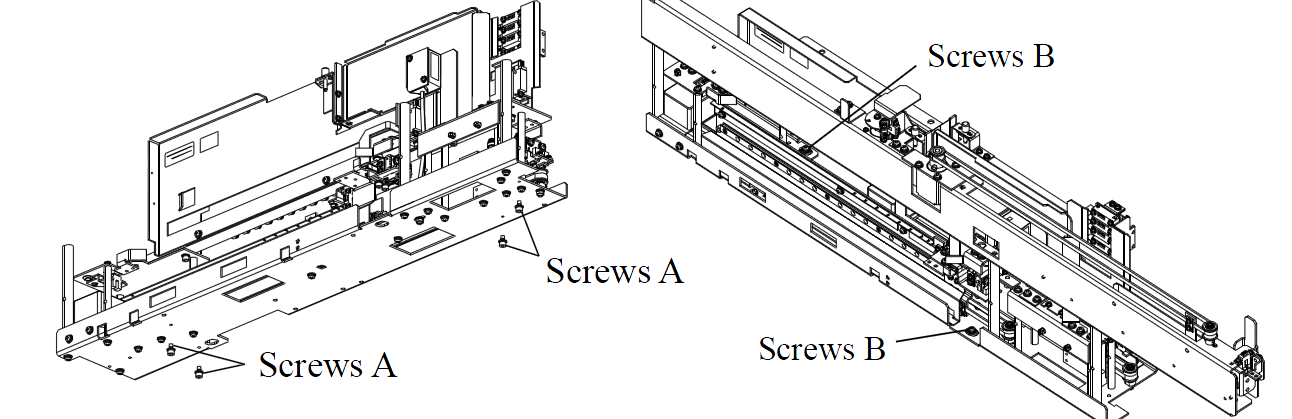
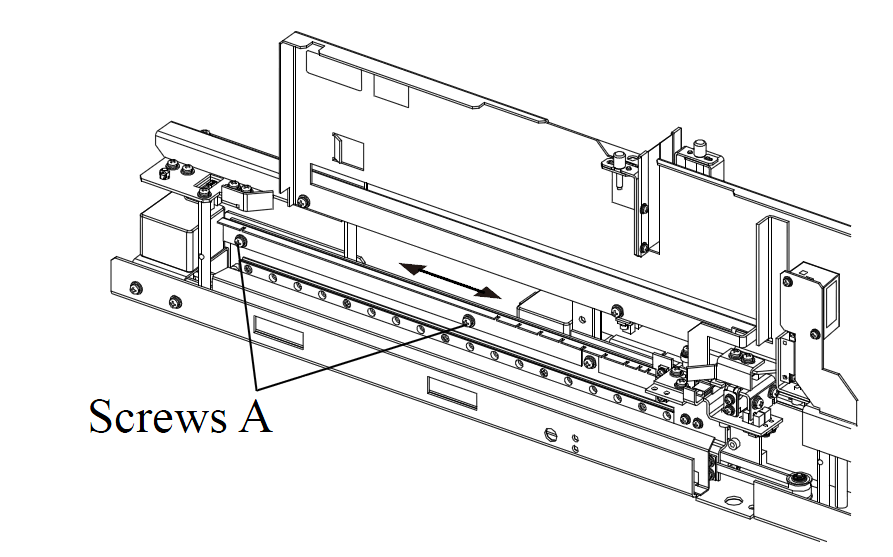
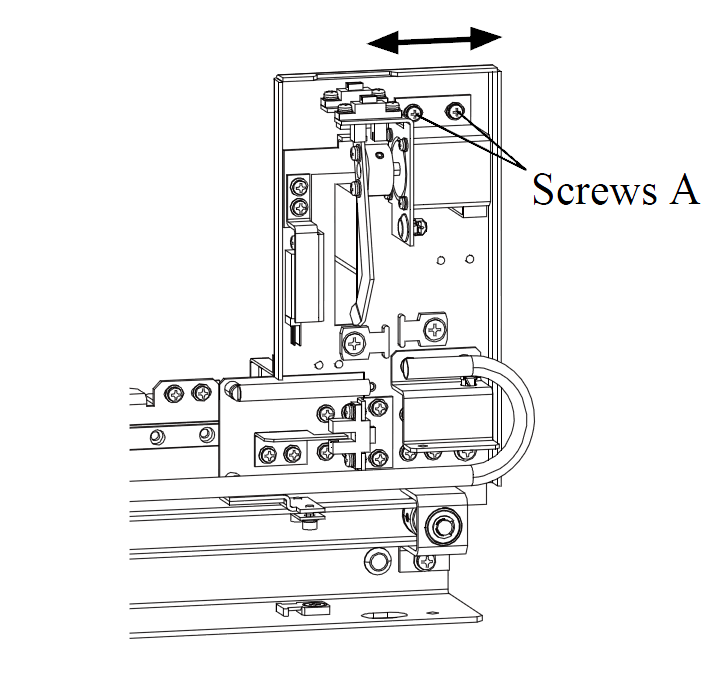
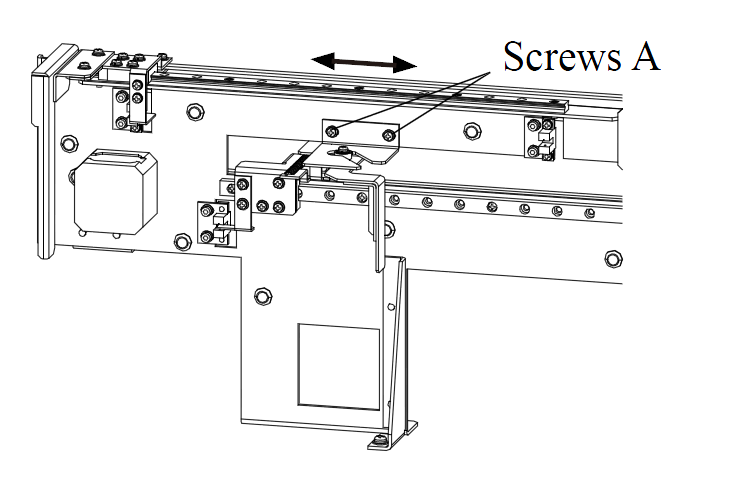
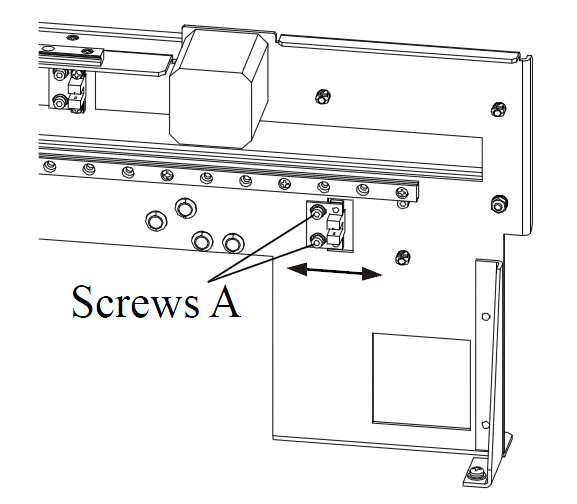
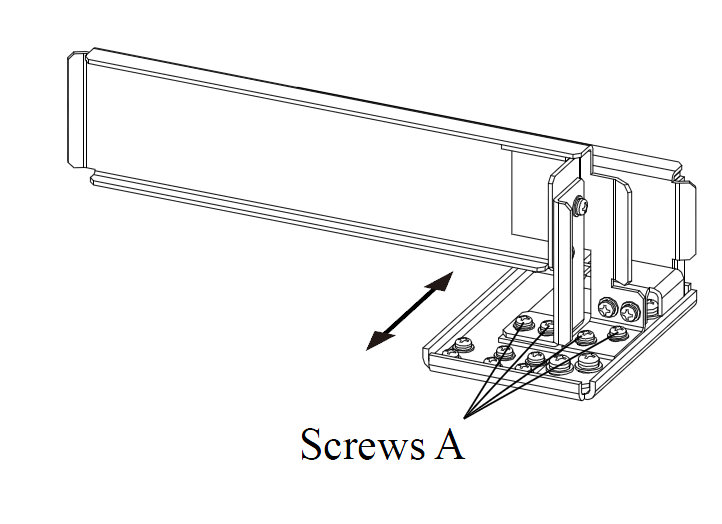
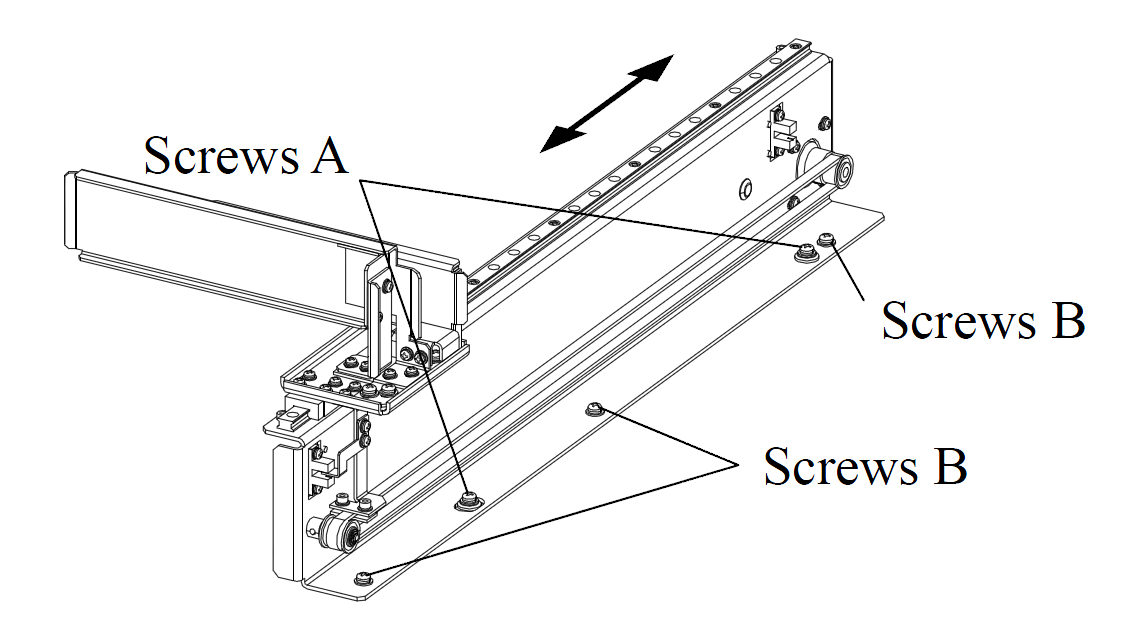
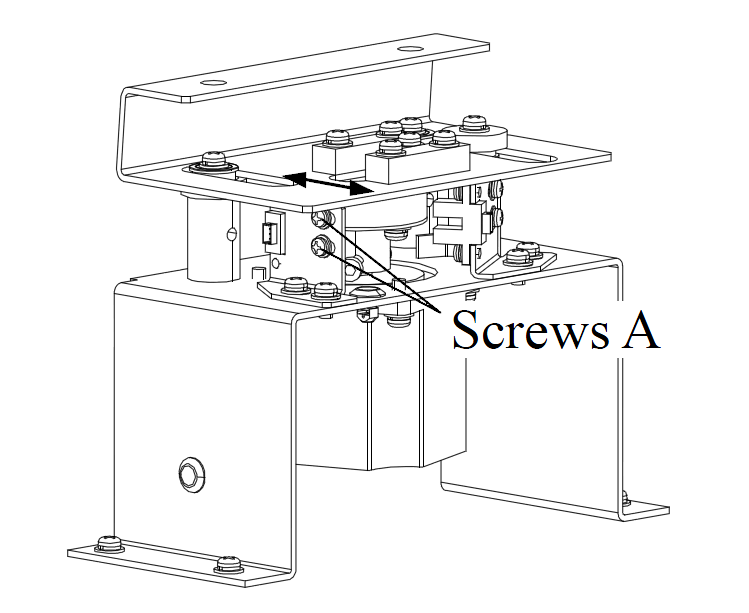
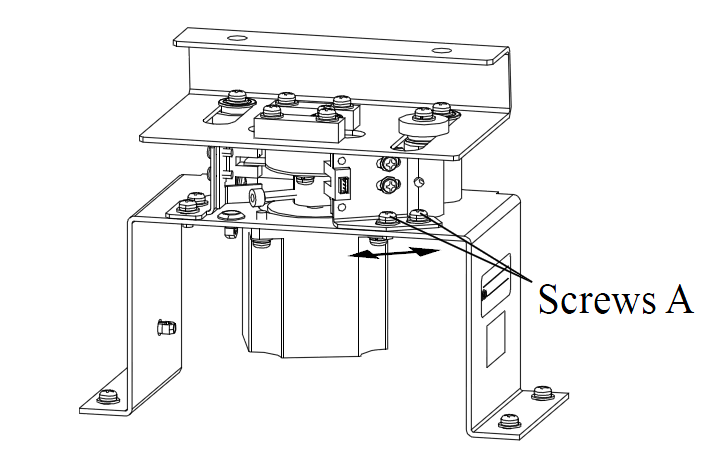
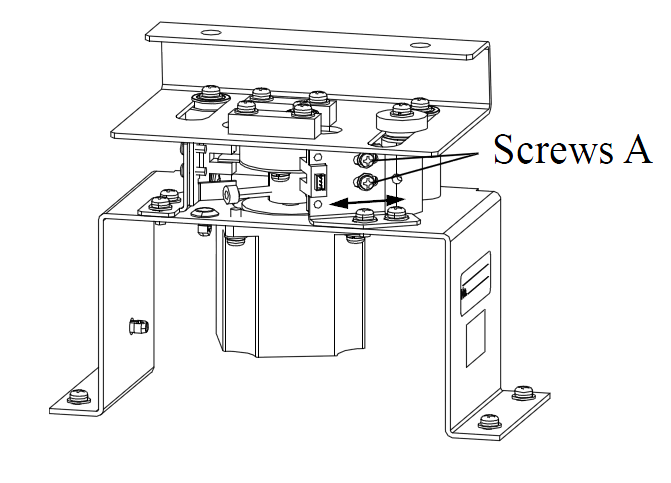
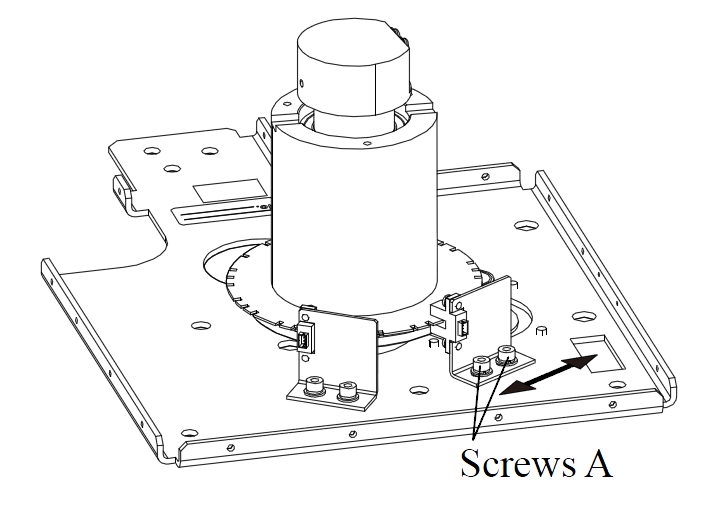
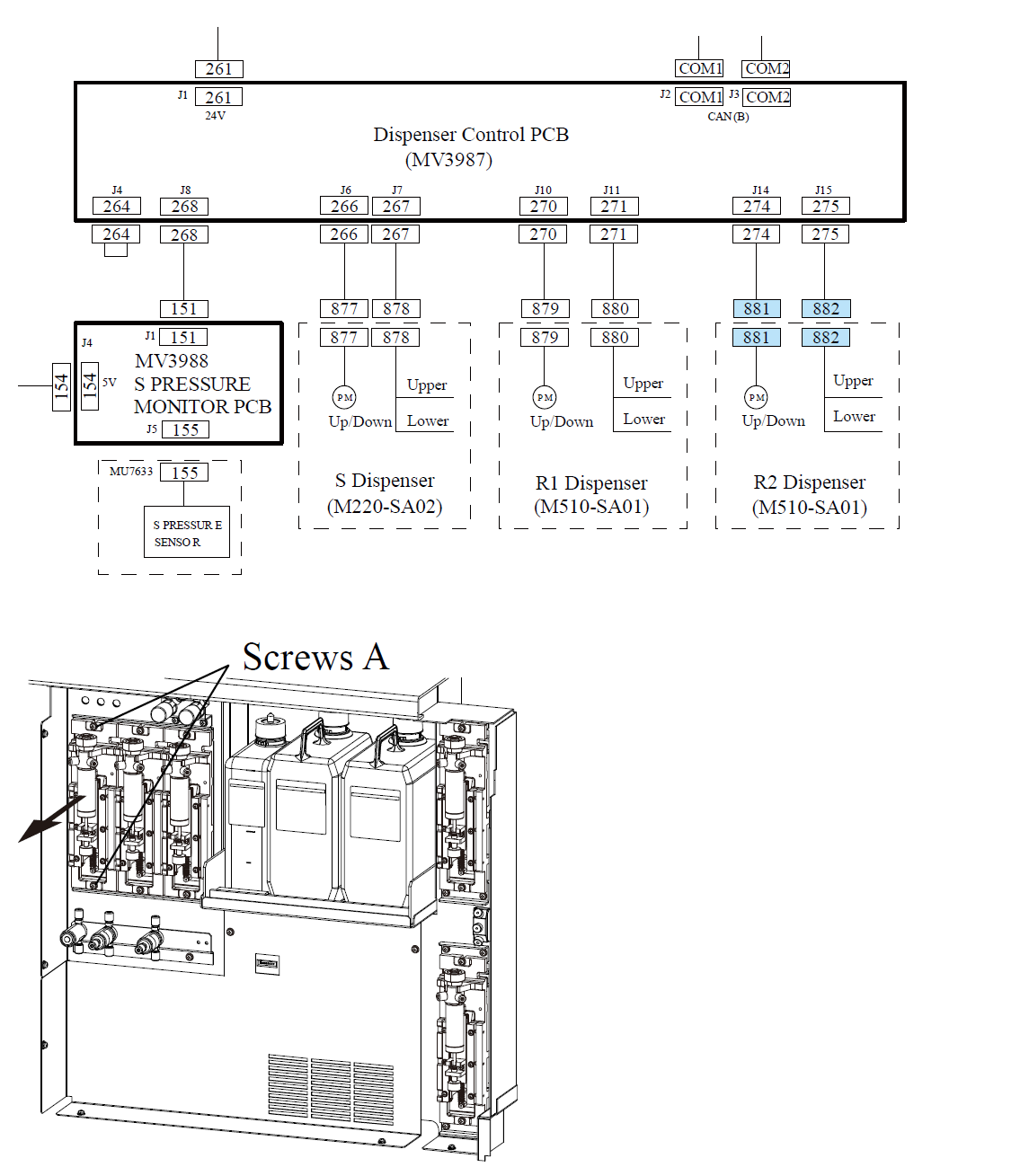
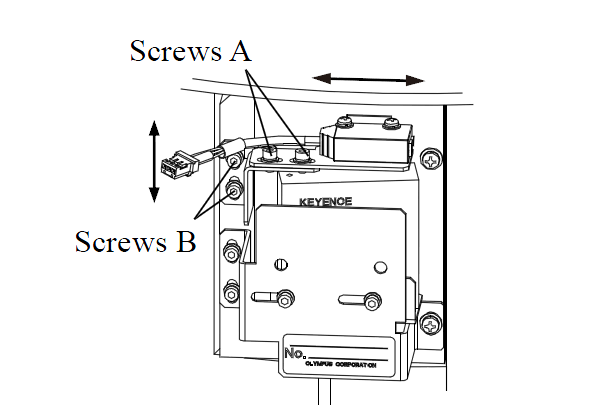
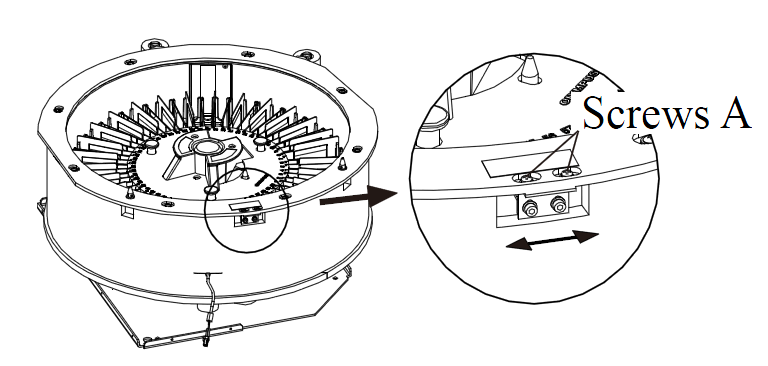
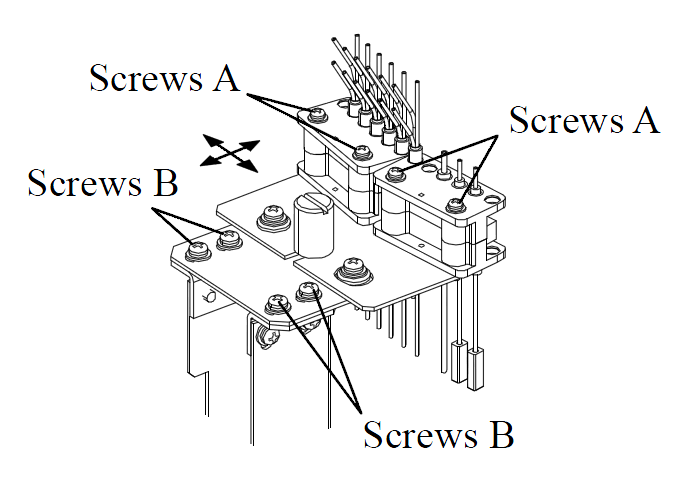
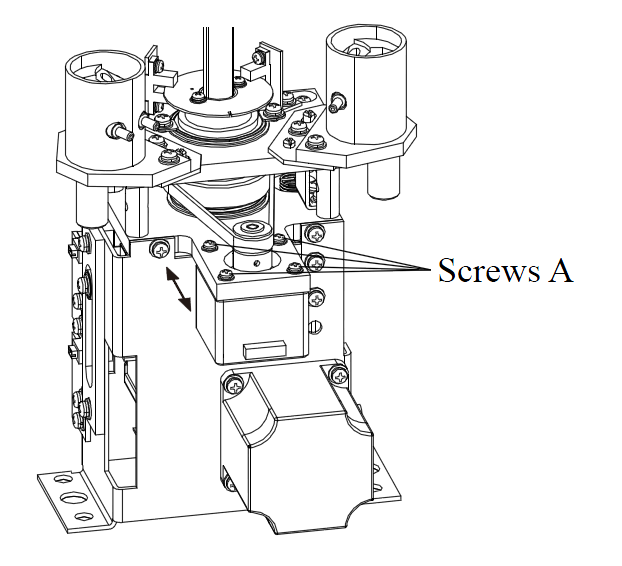
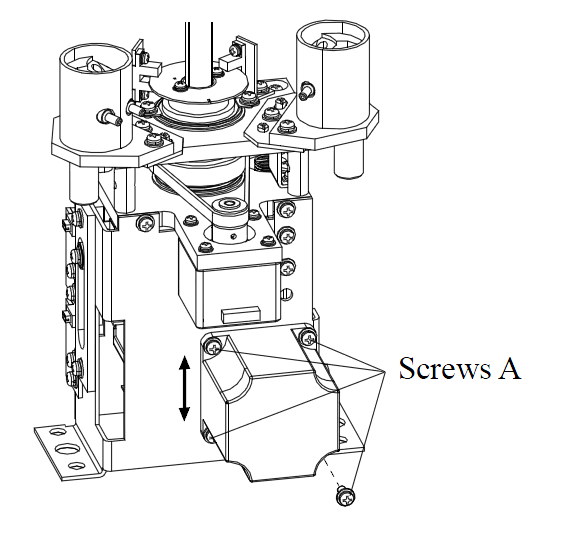
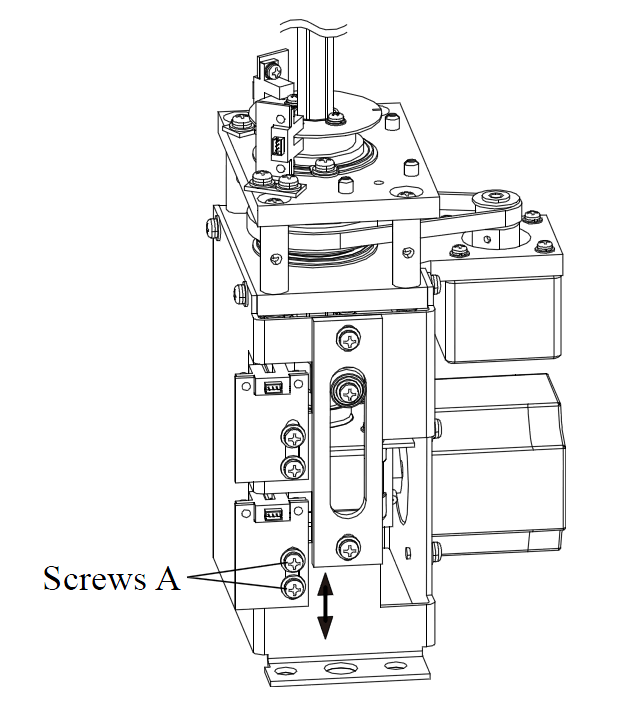
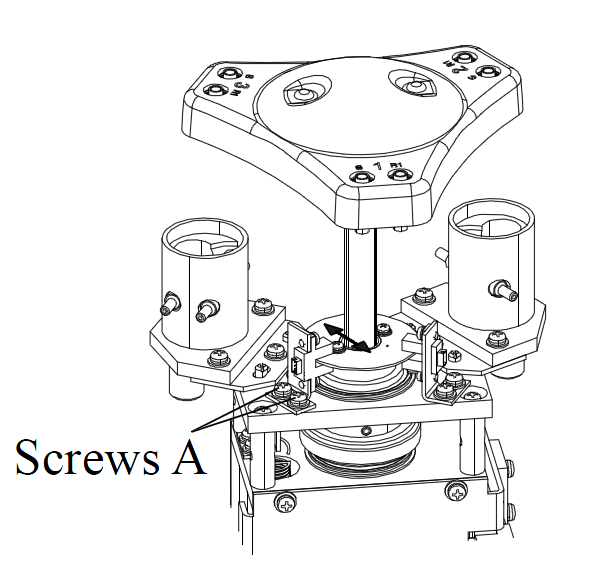
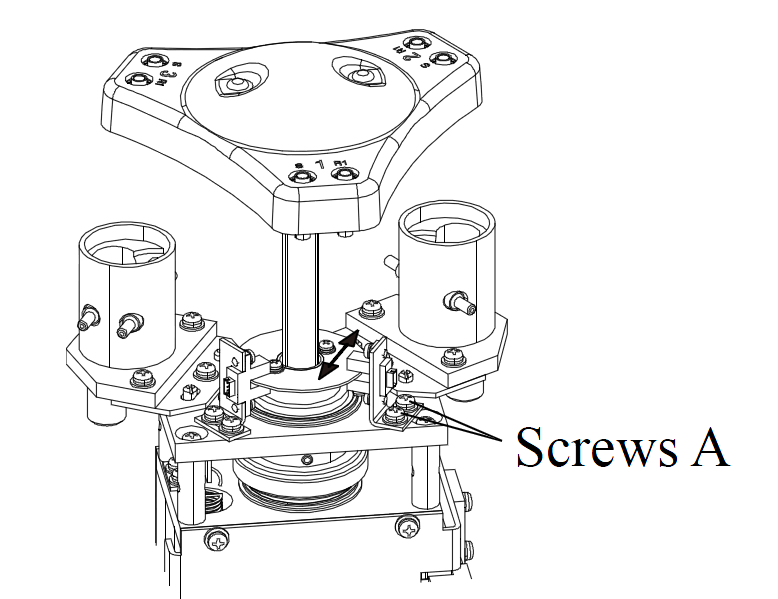
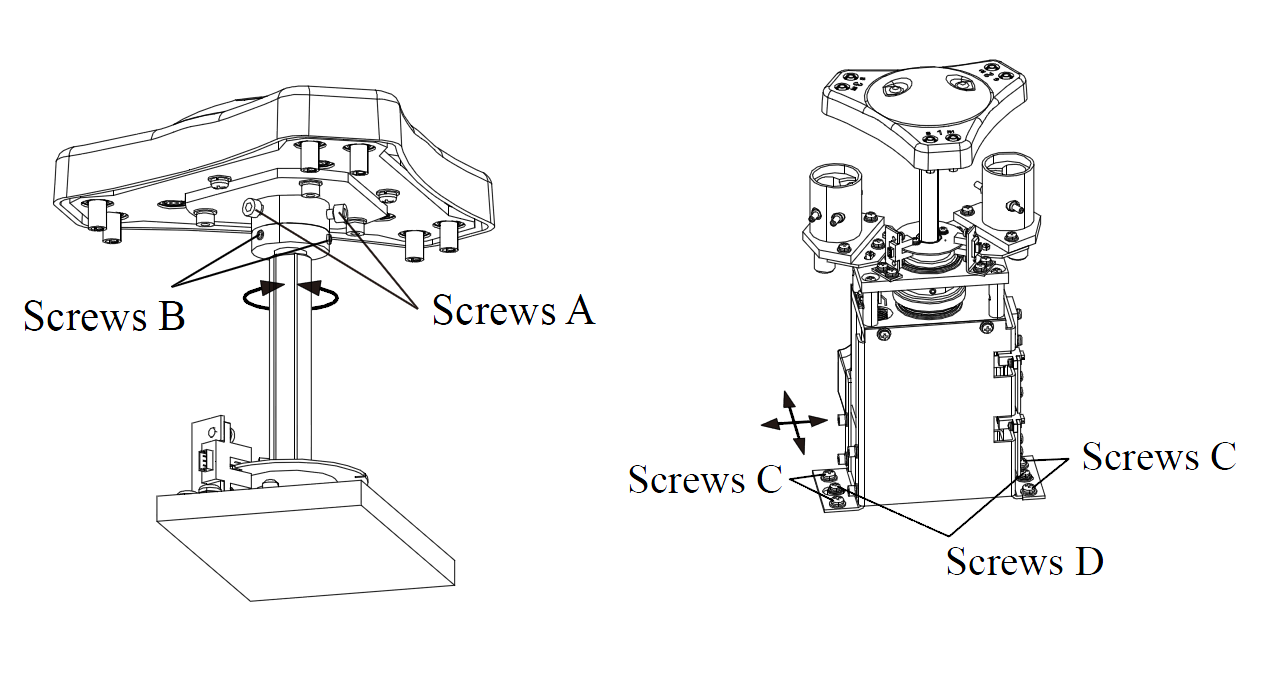
FC单元的拆卸要拆除上盖板,拔掉相关的插头和冲洗池的相关管道。拆卸螺丝A抬出搅拌站,但不要拆卸螺丝B,它们不起固定作用。
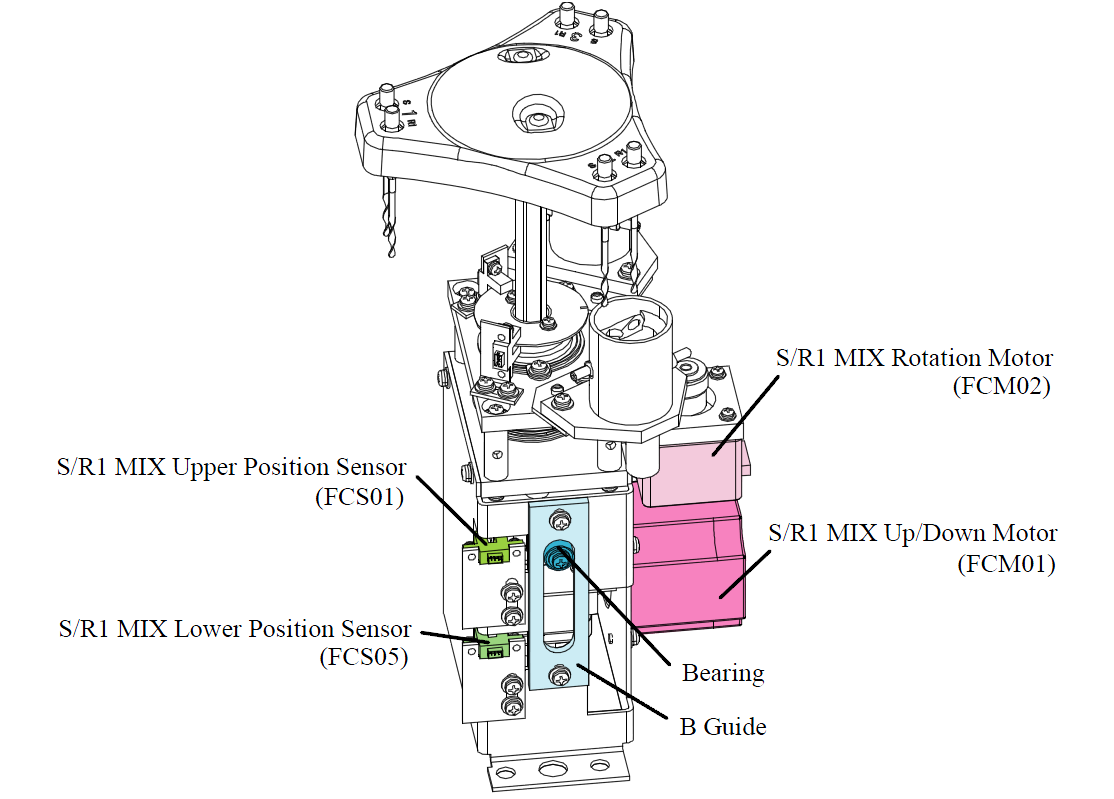 
上图是FC01的结构示意图,下面是FC11的结构示意图
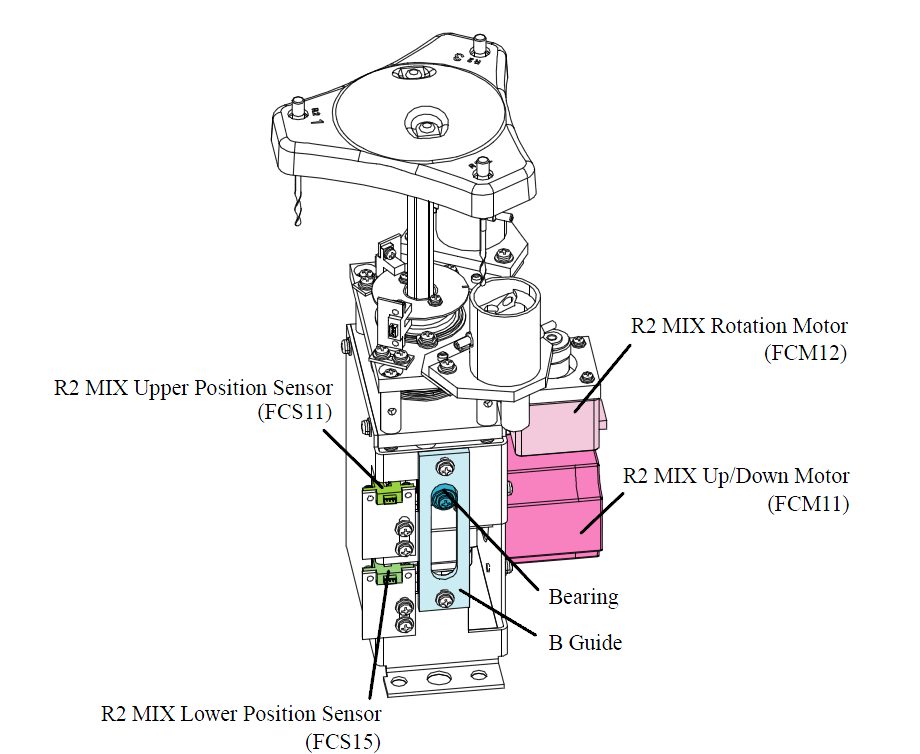 
由此可见二者的结构完全一样、
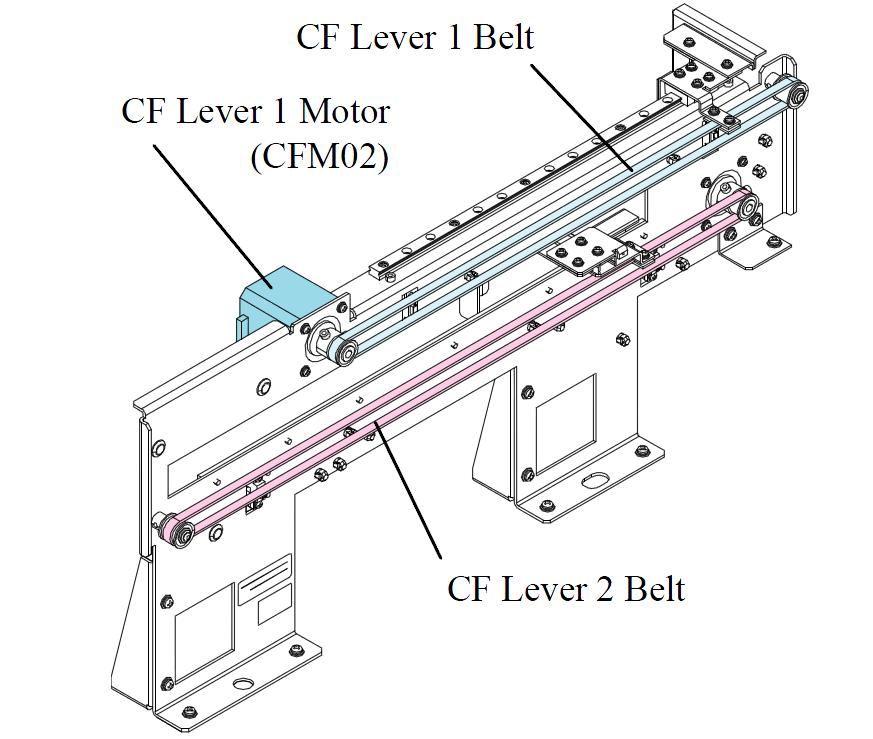
FCM01/11是上下马达,皮带传动。FCM02/12是摆动马达也是皮带传动。FCM03/13是搅拌棒旋转马达,齿轮齿杆及齿轮减速组套传动。
FCS01/11是上位传感器,FCS05/15是下位传感器。
FCS02/12是摆动初始位置传感器,FCS03/13是摆动停止位传感器。
FCS04/14是搅拌棒转速检测传感器。
上下移动时,与冲洗站一样,也有弹簧起平稳作用。当FC单元复位时,编号为1的那组搅拌站位于反应杯的上方。
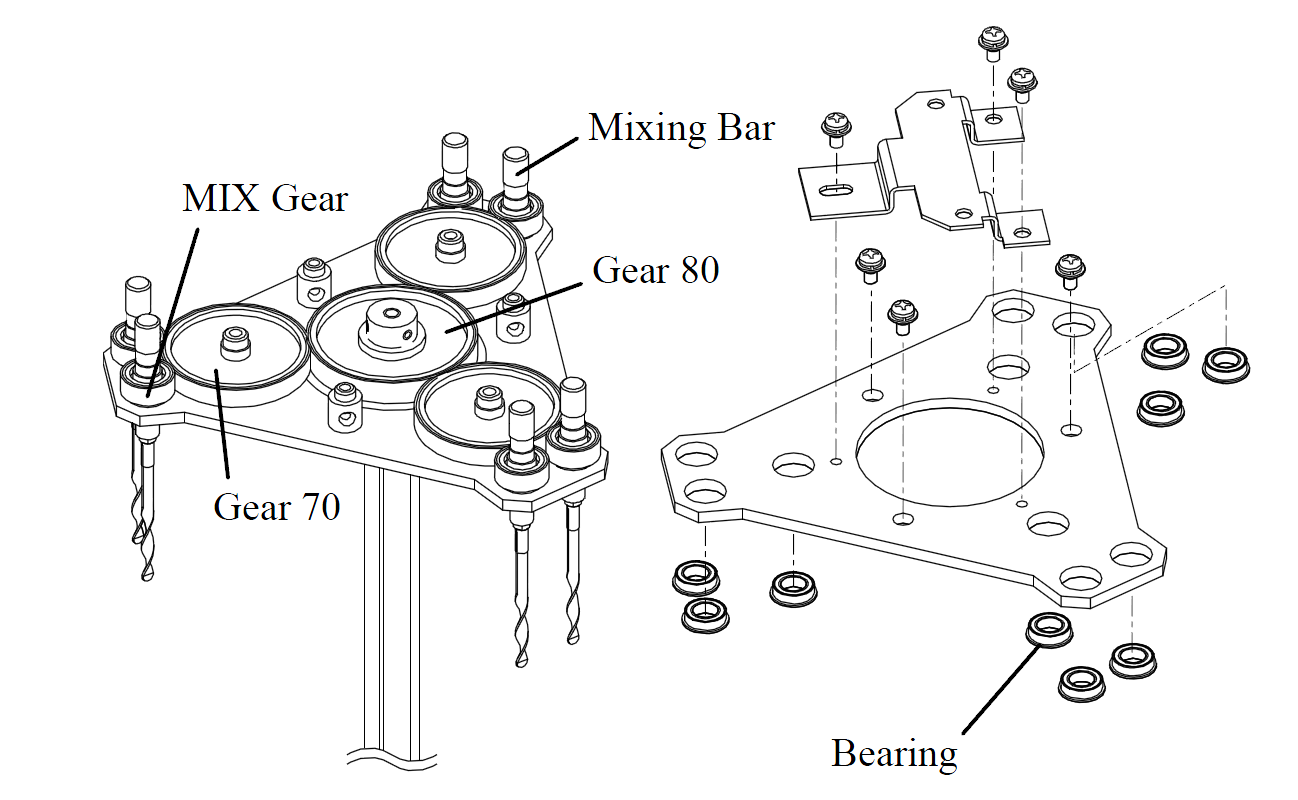
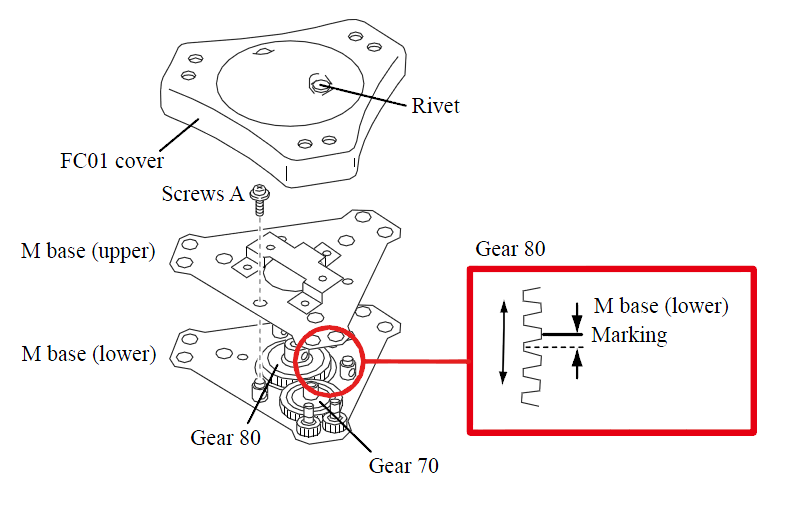
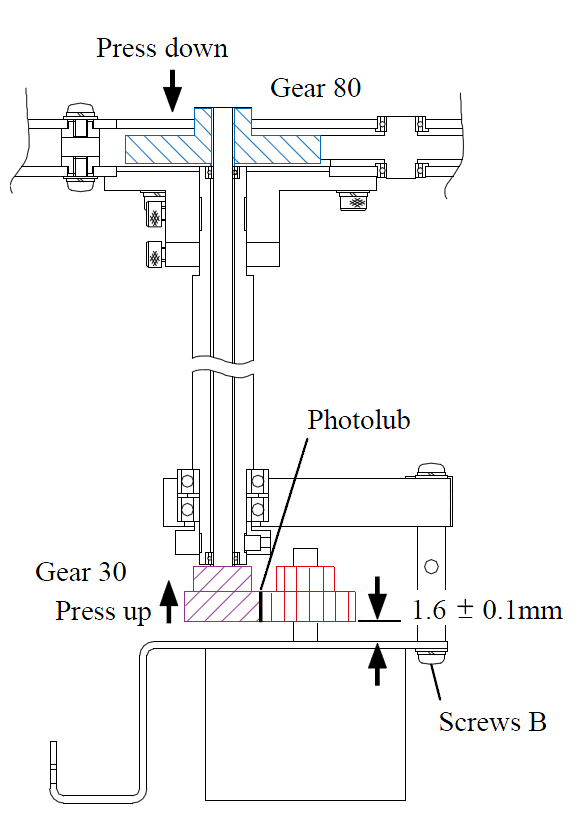
上图是搅拌站上盖打开后的样子,中间的大齿轮是80齿,通过中心轴从下面的搅拌马达传动上来,周围三个稍微小一点儿大齿轮是70齿,70齿再与周围三个或六个搅拌齿轮啮合旋转。齿轮本身是塑料的,应该不需要润滑,但噪音会很大。有专门的塑料润滑脂或氟素润滑脂可用,降低噪音非常明显。但要先保证80齿安装正确。
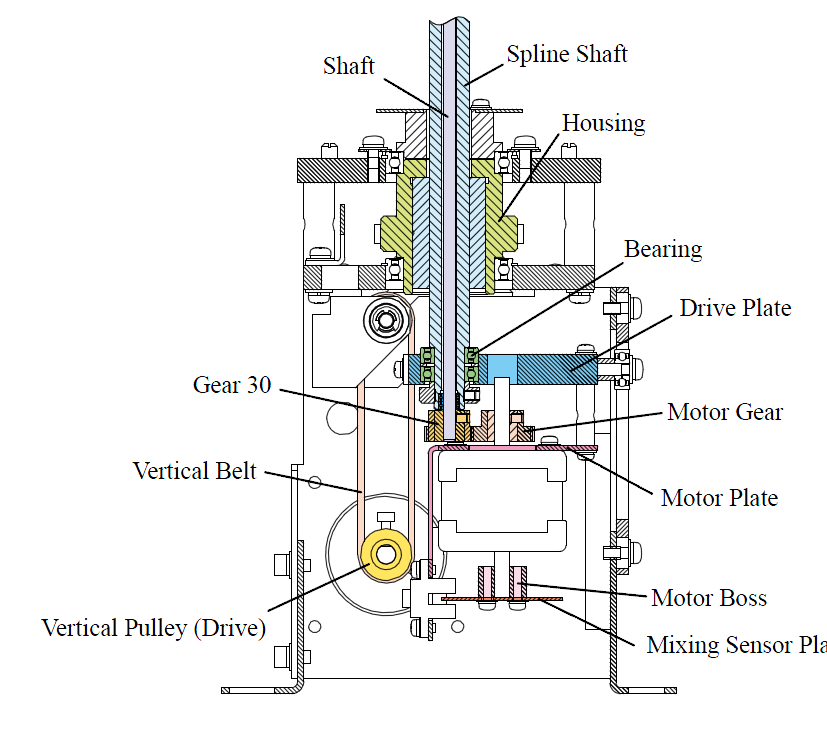 、 、
这是机械结构的剖视图搅拌马达的码盘不是为了定位,而是给测试传感器测速使用。马达的主齿轮直接带动30齿齿轮,由30齿和上面的80齿组成的齿杆传动。这组齿轮的配合非常重要,否则就会出现三组搅拌棒在某个位置不转,转速慢,或时转时不转的情况。
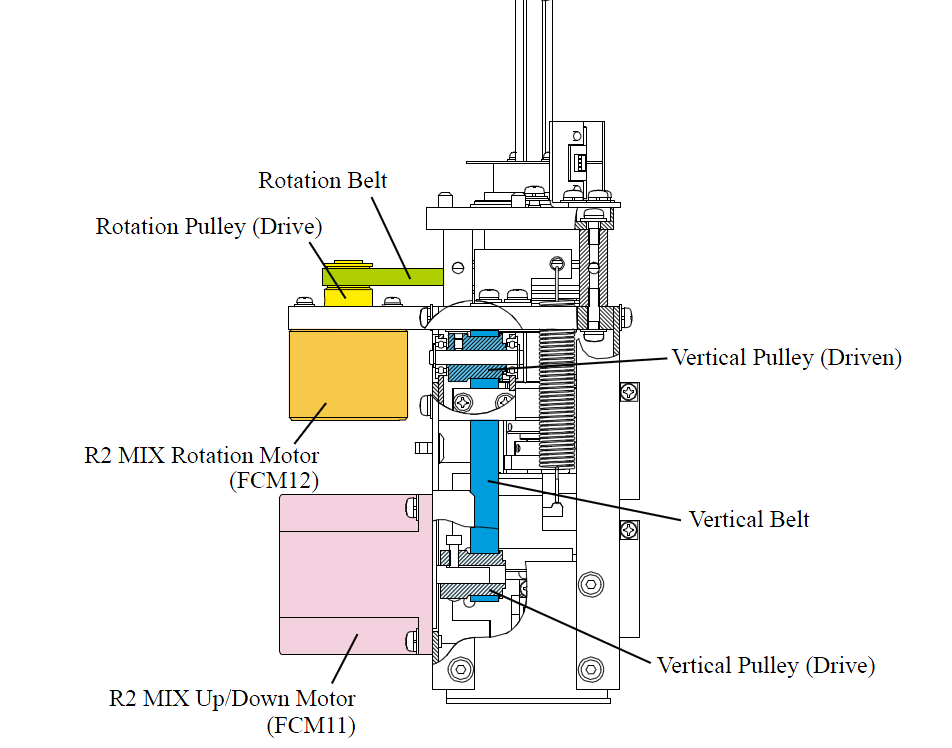
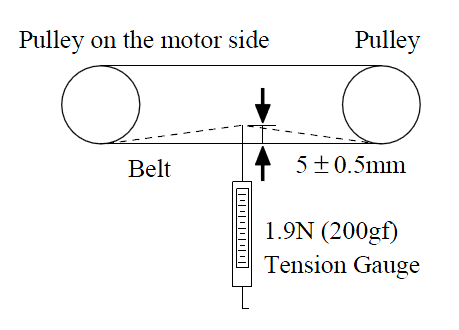
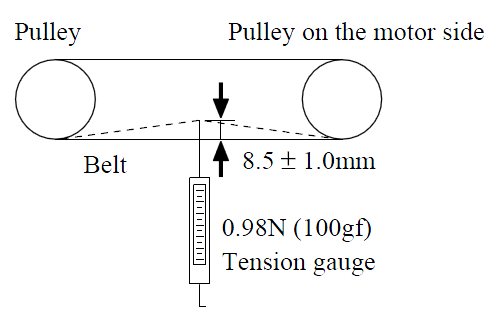
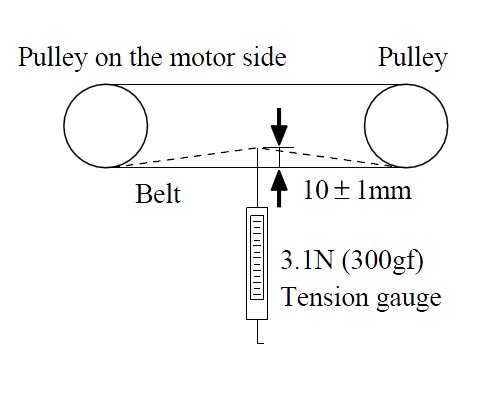
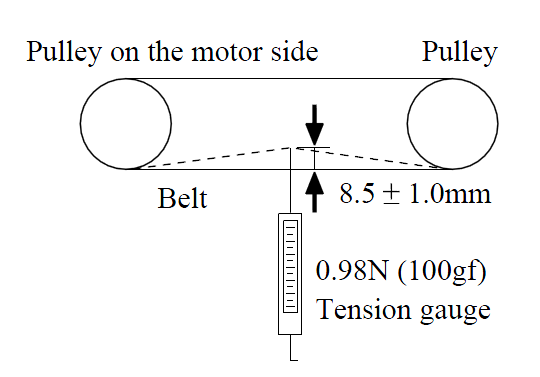
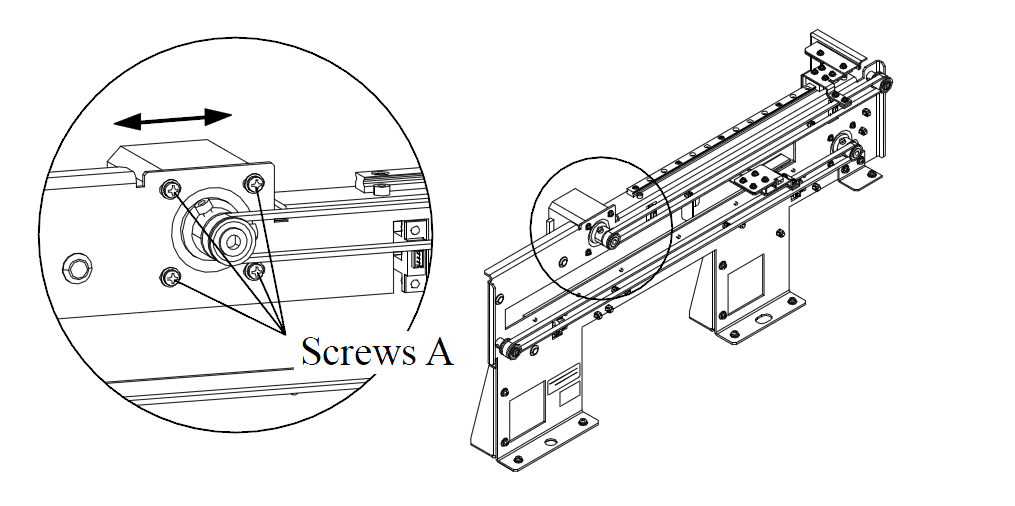
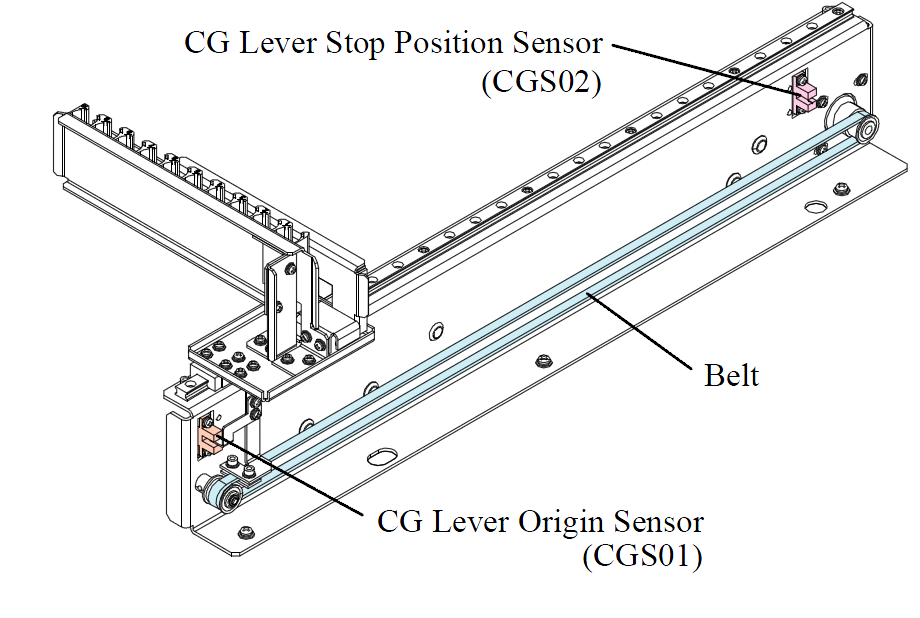
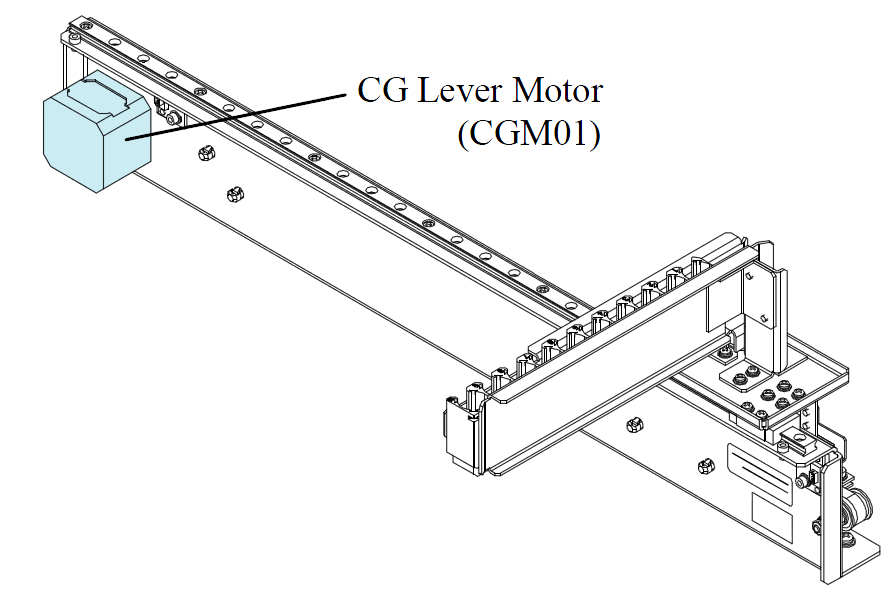
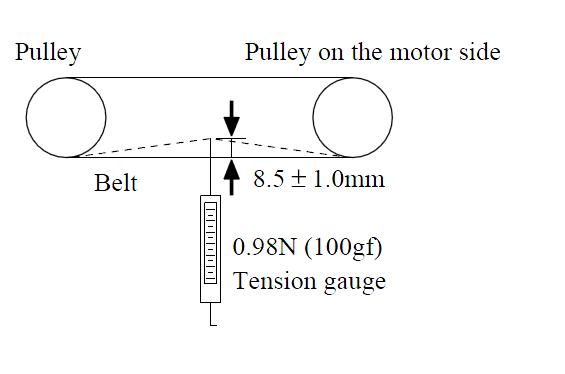
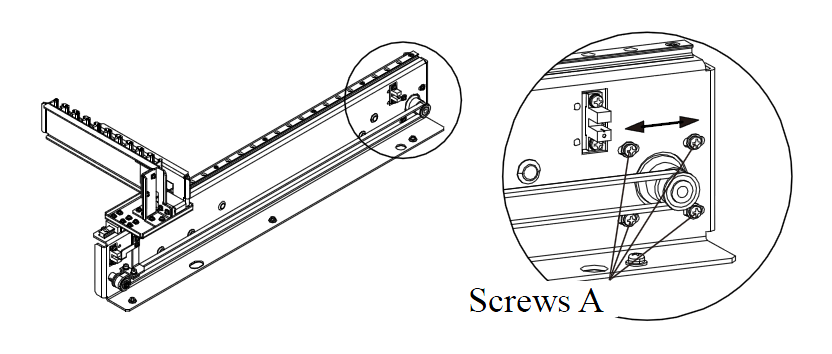
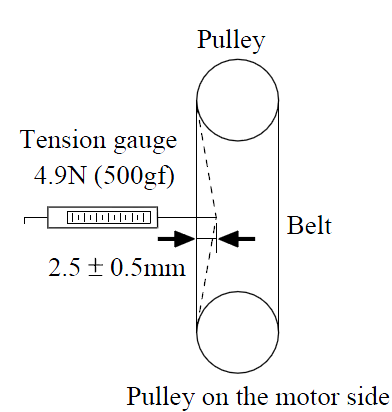
皮带张紧度检查和调整步骤:
摆动皮带的张紧度检查调整方法:
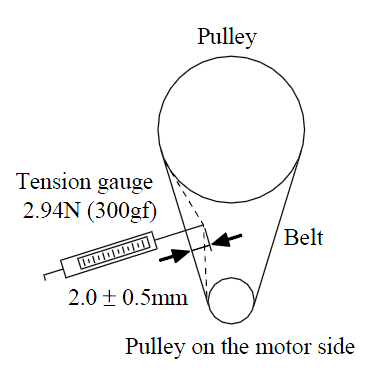 
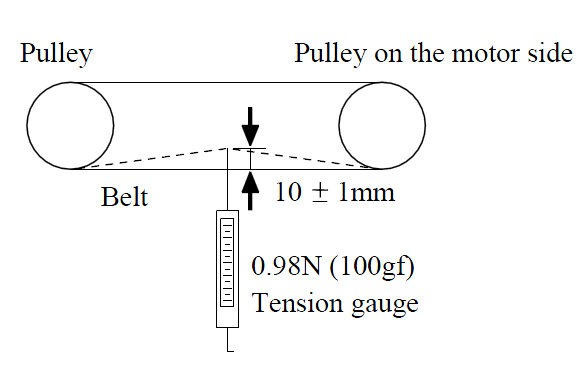
上下皮带的张紧度检查调整方法:
搅拌齿轮晃量的检查调整步骤:
这个检查和调整要抬出搅拌站进行,否则无法从事这样工作。
检查:
拆除搅拌站的上塑料盖和上金属盖板,拿掉三个70齿轮,在80齿和底板上做标记,标记的位置是任意一个齿尖中心或齿底的中心。整个过程不过拆掉固定在底板上的轴承。这是轻轻转动80齿,注意用力程度,使80齿产生左右晃动,但齿轴并没有跟着旋转,这就是晃量。这个晃量与刚才标记的位置进行比对,应该在半个齿距左右。
晃量过大,导致噪音和旋转不平衡。晃量过小会导致怠速,转速报错甚至发出闷声。
调整:
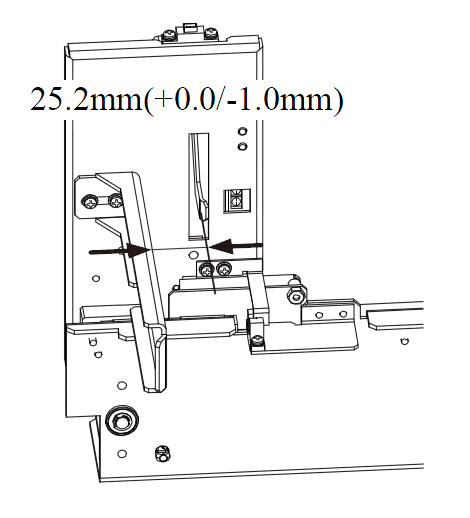
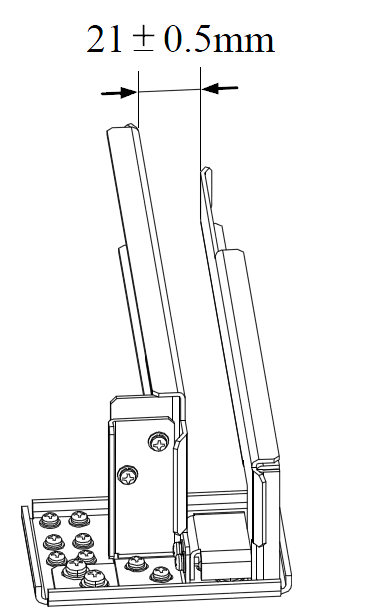
松开搅拌旋转马达的固定螺丝B,下压80齿上压30齿,后者一直保持上压的力量。这么做的目的是保持齿轴的垂直,否则倾斜的话一样会出现刚才说的问题。由于30齿和80齿的垂直,影响到已经松开固定的旋转马达的位置,这时的马达齿轮已经不在原来的位置,但仍然与30齿保持啮合。这时尝试固定旋转马达,并测量马达齿轮下平面与固定基板的间隙为1.6±0.1mm,同时30齿与马达齿轮有一个能够透光的缝隙,这个缝隙只要眼能看出来差不多最少0.2mm。反复调整,直到各个指标都符合要求。
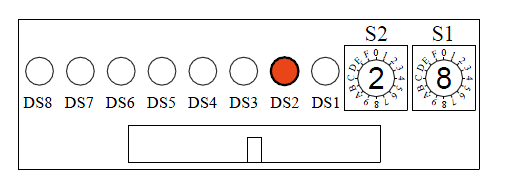
上位传感器的检查调整步骤:
复位搅拌站[ R1/2 MIXING UNIT [FC]/ Reset
],执行下降搅拌站[ R1/2 MIXING UNIT [FC]/ Up-Down
Pulse/ Down
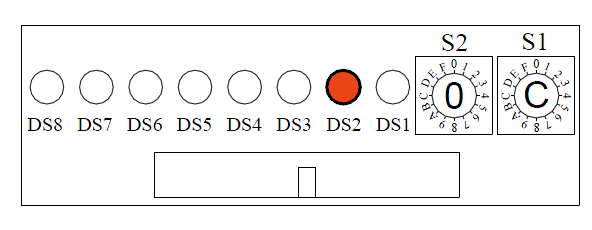
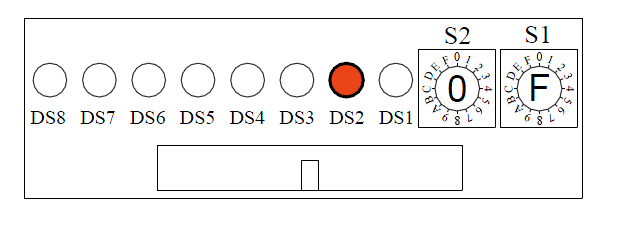
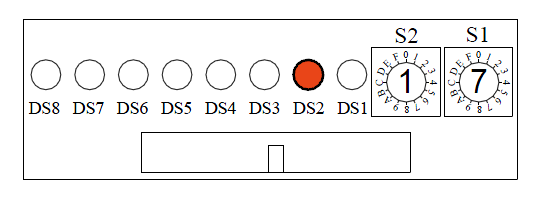
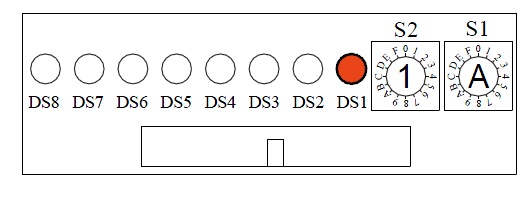
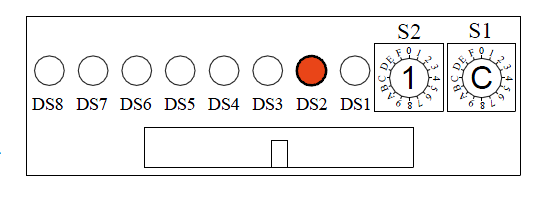
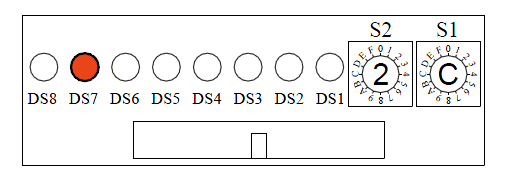
]按诊断开关开始计数脉冲数,UDCD42对应的LED由亮变灭的脉冲数为8±2个。
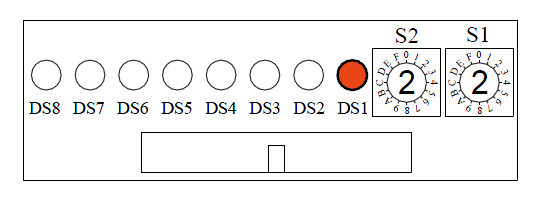
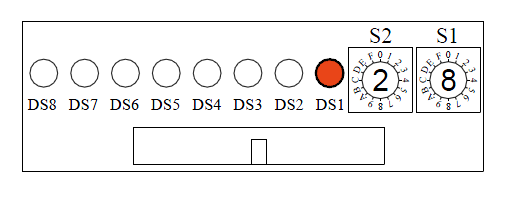
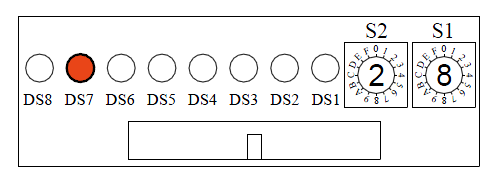
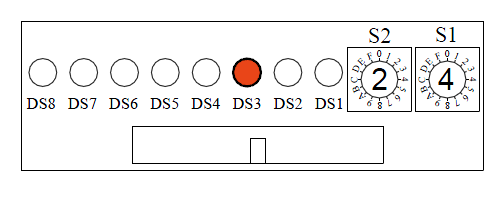
FC01的UCDC42是DS1 (SW2 = 3, SW1 =
7),FC11的UCDC42是DS1 (SW2 = 3, SW1 = E)
上位传感器不可调整,必要时处理或更换控制板。
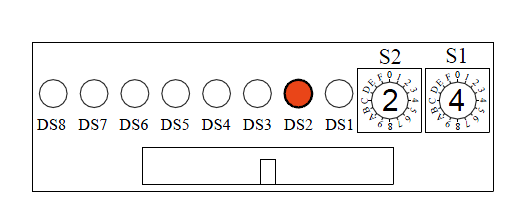
下位传感器的检查和调整步骤:
复位FC单元[ R1/2 MIXING UNIT [FC]/ Reset ],执行[
R1/2 MIXING UNIT [FC]/ Up-Down Step
]下降,然后执行[ R1/2 MIXING UNIT [FC]/ Up-Down
Pulse/ UP
]上升,按诊断开关计数脉冲数,UDCD对应的LED由亮变灭的脉冲数范围是10±2个,否则调整下位传感器位置。
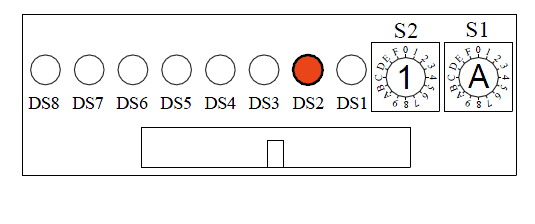
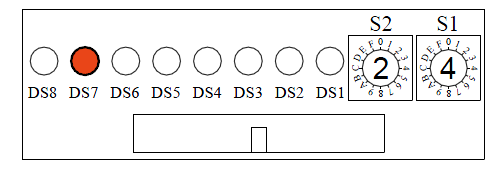
UDCD42设置:FC01是DS2 (SW2 = 3, SW1 =
7),FC11是DS2 (SW2 = 3, SW1 = E)。
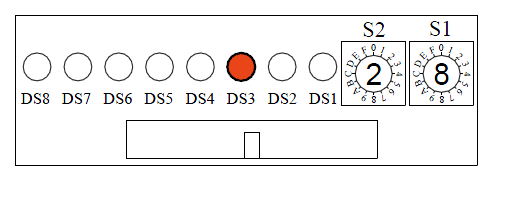
初始位置传感器的检查和调整步骤
复位FC单元[ R1/2 MIXING UNIT [FC]/ Reset ],执行[
R1/2 MIXING UNIT [FC]/ Rotation Pulse/ CCW
]反转,按诊断开关计数脉冲数,UDCD42对应的LED由亮变灭的脉冲范围为9±2个。然后执行复位[
R1/2 MIXING UNIT [FC]/ Reset ],在执行[ R1/2
MIXING UNIT [FC]/ Rotation Step ],确认LED不亮。
否则调整初始位置传感器的位置。
UDCD42设置:FC01是DS1 (SW2 = 3, SW1 =
9),FC11是DS1 (SW2 = 4, SW1 = 0)。
停止位置传感器的检查和调整步骤:
复位FC单元[ R1/2 MIXING UNIT [FC]/ Reset ],执行[
R1/2 MIXING UNIT [FC]/ Rotation Pulse/ CW
]正转,按诊断开关计数脉冲数,UDCD42对应的LED由亮变灭的脉冲数范围大于8个。然后再复位FC单元[
R1/2 MIXING UNIT [FC]/ Reset ],执行[ R1/2
MIXING UNIT [FC]/ Rotation Pulse/ CCW
]反转,按诊断开关计数脉冲数,UDCD42对应的LED由亮变灭的脉冲数范围大于8个。
UDCD设置:FC01是DS2 (SW2 = 3, SW1 = 9),FC11是DS2
(SW2 = 4, SW1 = 0)
否则调整停止位传感器的位置。
搅拌棒高度检查调整步骤:
搅拌棒的高度不能过高过低,过高搅拌效果不佳,过低会触碰反应杯底部,造成反应杯划伤和搅拌棒不沾涂层划伤,形成交叉污染。
高度检查有两种方法,卡尺或假棒定高器均可。
复位FC单元[ R1/2 MIXING UNIT [FC]/ Reset
],执行下降命令[ R1/2 MIXING UNIT [FC]/ Up-Down
Step
],取下反应杯上面的一根搅拌棒,从上部用卡尺的探深端插入,一直插到反应杯底部,卡尺读数应该是68.5-69mm之间。
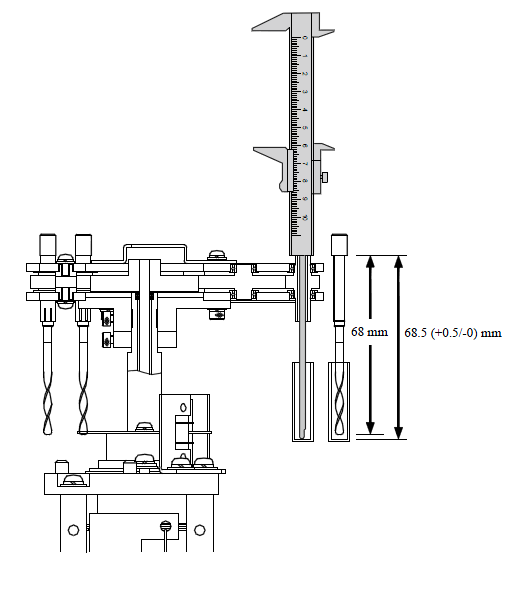
或者执行上面的诊断程序,把反应杯上方的搅拌取下换成假棒,把对应的反应杯取下换成定高器,假棒的底端应该在定高器高低限制范围内。
否则调整搅拌站上部的高度,松开螺丝A调整。但要注意不要发生摆动,要与摆动位置反复检查核对。
反应杯位置检查调整步骤:
复位FC单元[ R1/2 MIXING UNIT [FC]/ Reset
],执行下降命令[ R1/2 MIXING UNIT [FC]/ Up-Down
Step
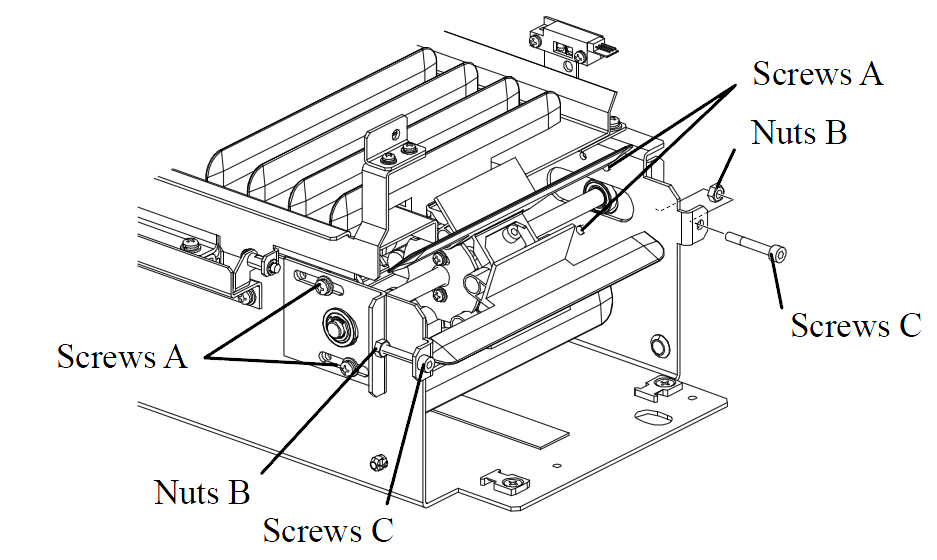
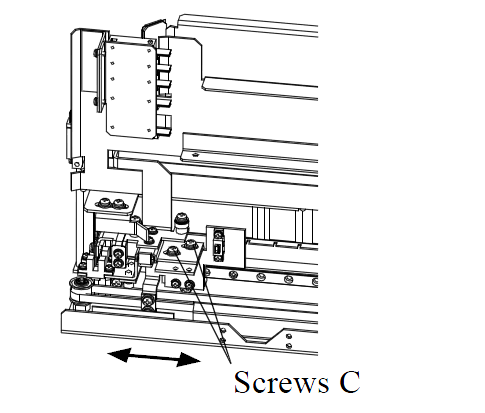
],确认各搅拌棒在反应杯位置的正中心,否则松开螺丝A调整或调整整个搅拌站的位置,注意螺丝D不是固定螺丝,不用松开。调整螺丝C即可。
冲洗池位置检查调整步骤:
复位FC单元[ R1/2 MIXING UNIT [FC]/ Reset
],执行下降命令[ R1/2 MIXING UNIT [FC]/ Up-Down
Step ],确认各搅拌棒在对应冲洗池位置的正中心,否则松开调整对应冲洗池的位置。
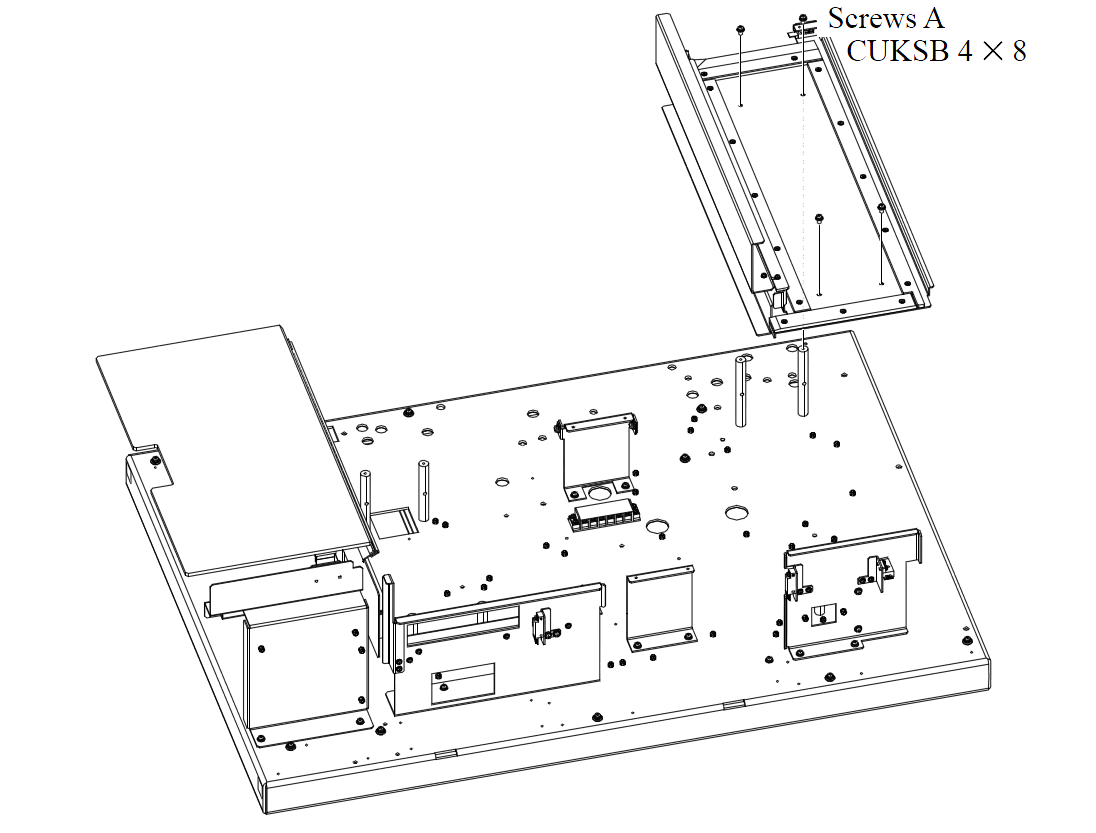
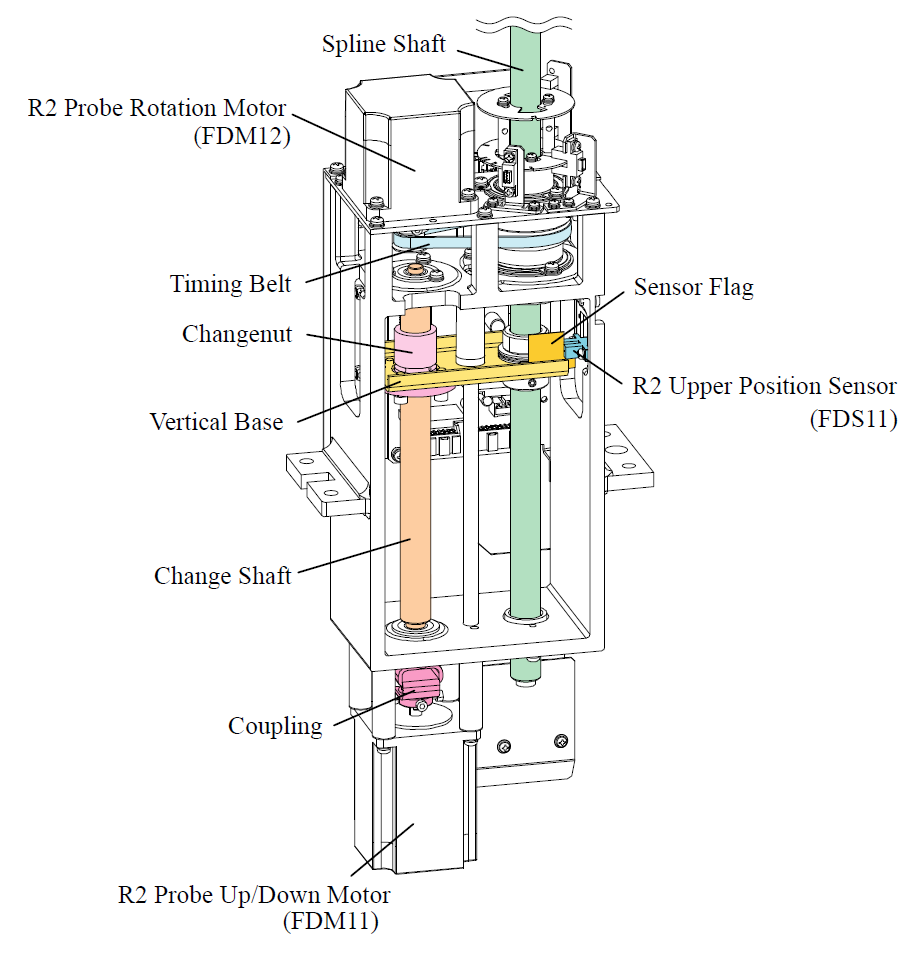
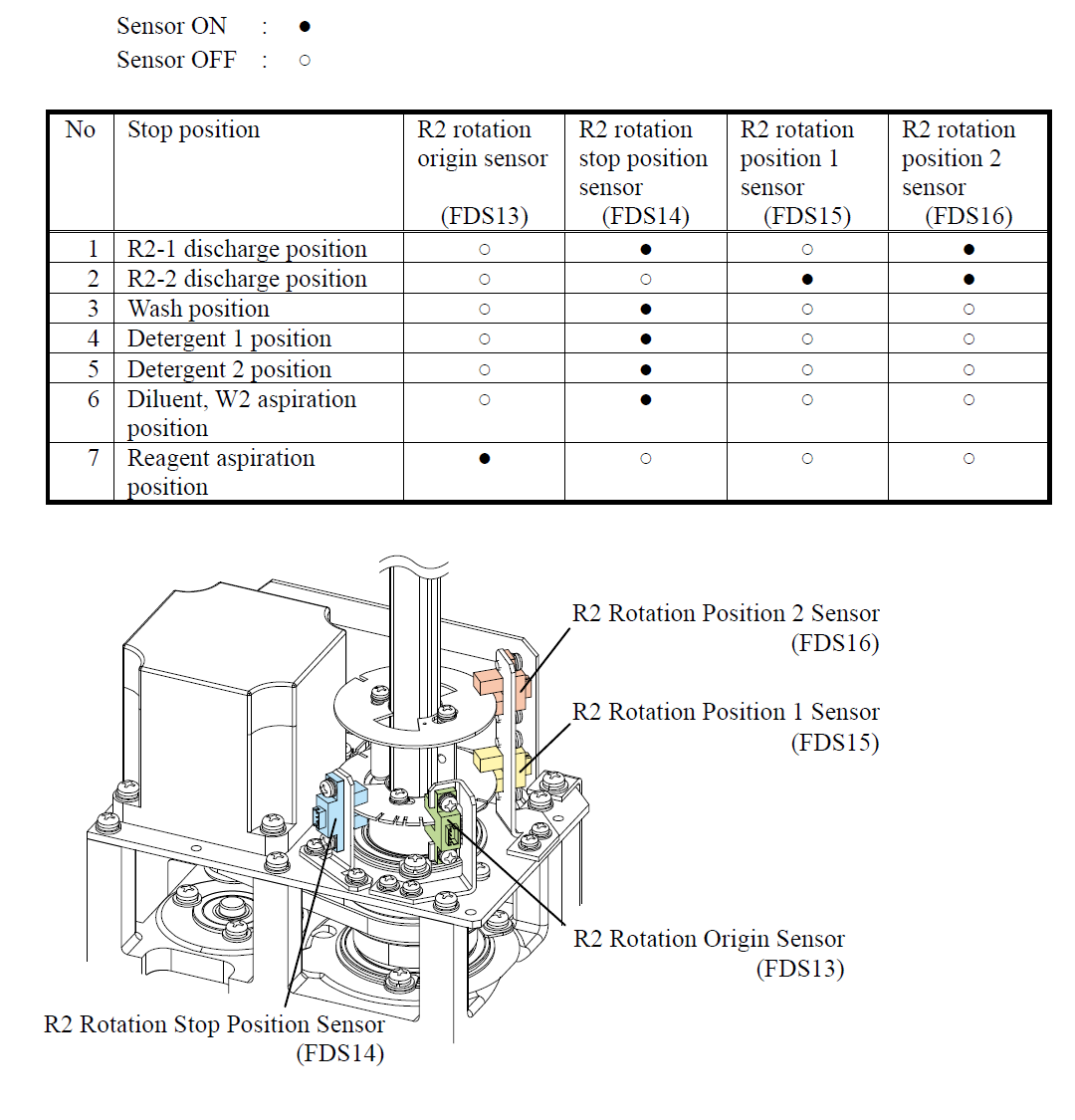
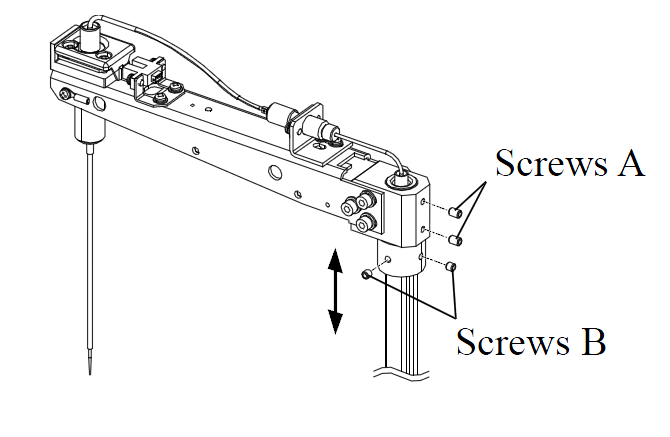
FD单元是试剂针单元,分位R1单元FD01和R2单元FD11。FD单元与样品针FA单元结构类似,区别在于少了一个中位传感器。
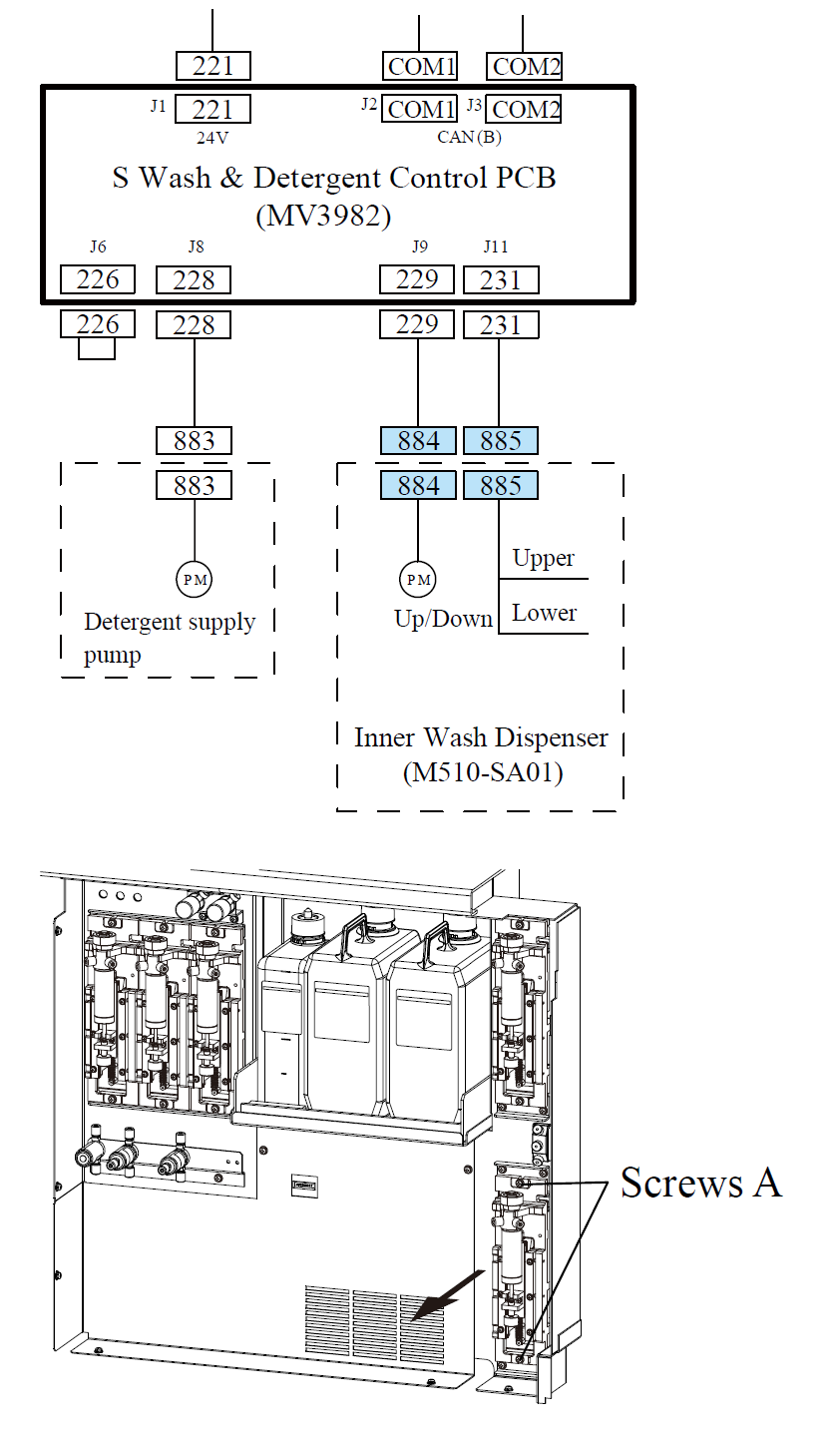
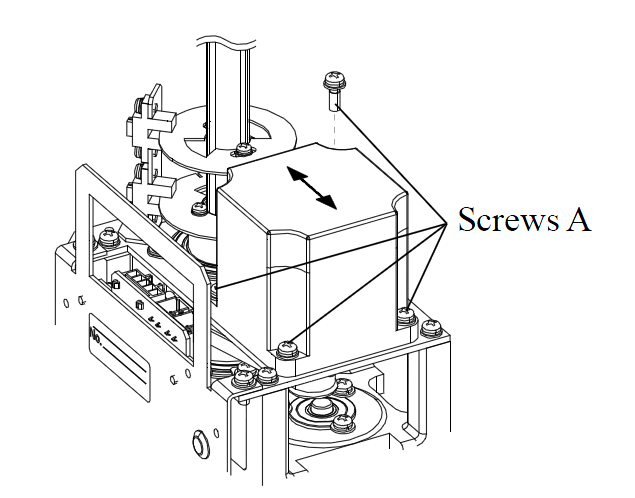
FD单元的拆卸需要拆除上盖板,拔掉相关的插头和管道,拧下固定螺丝A抬出整个单元。不要松开螺丝B,它们不起固定作用。
  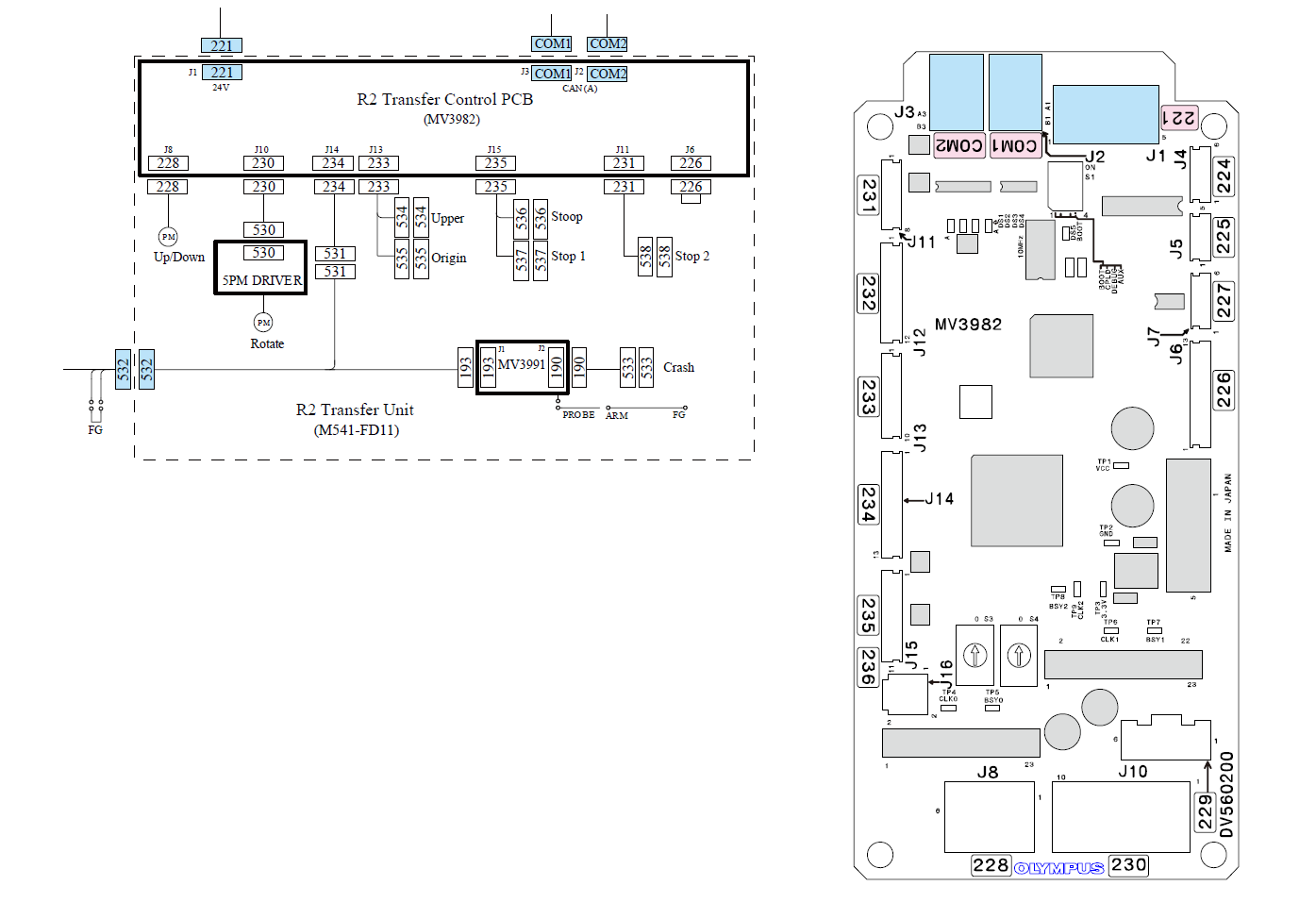
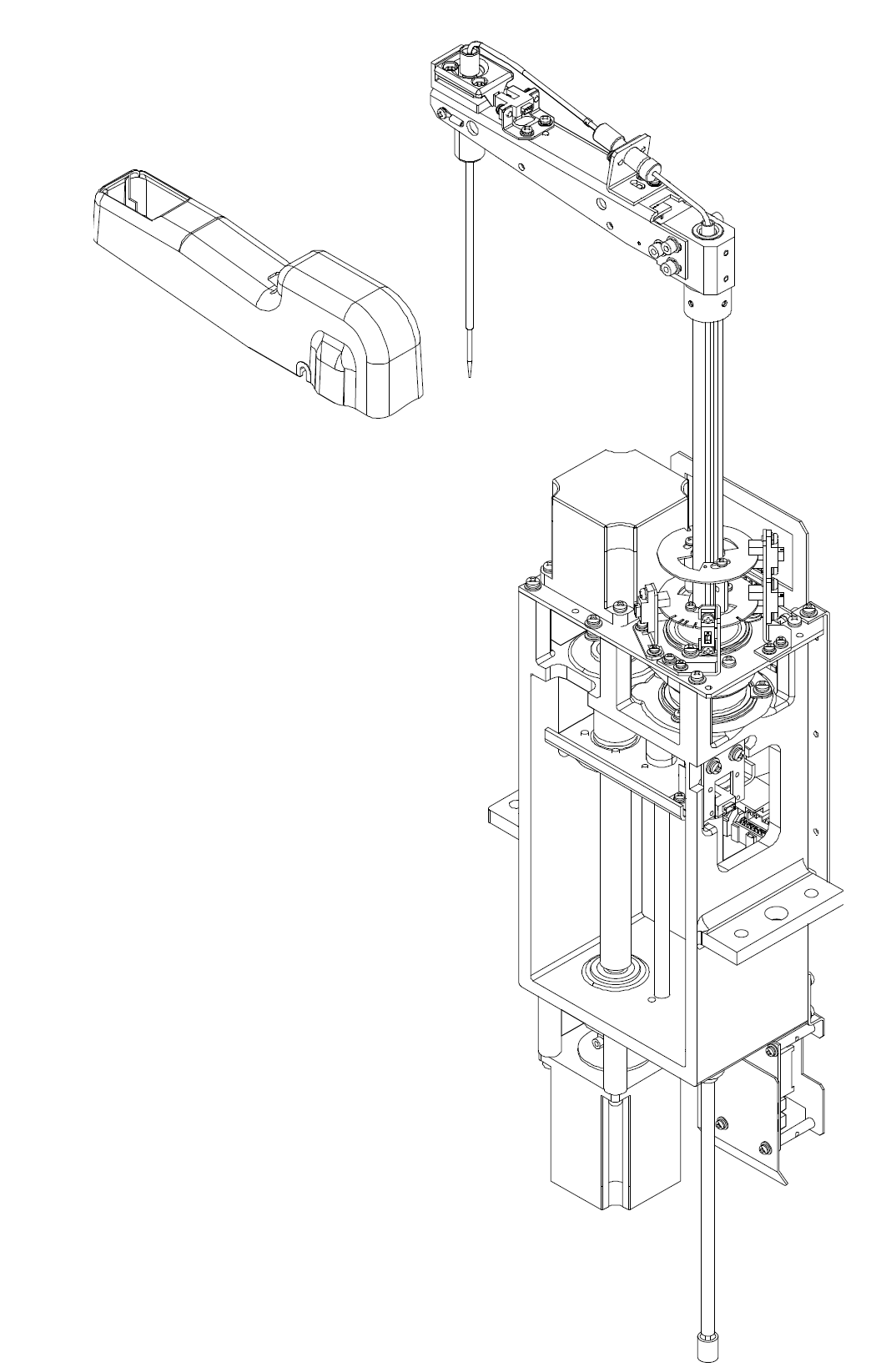 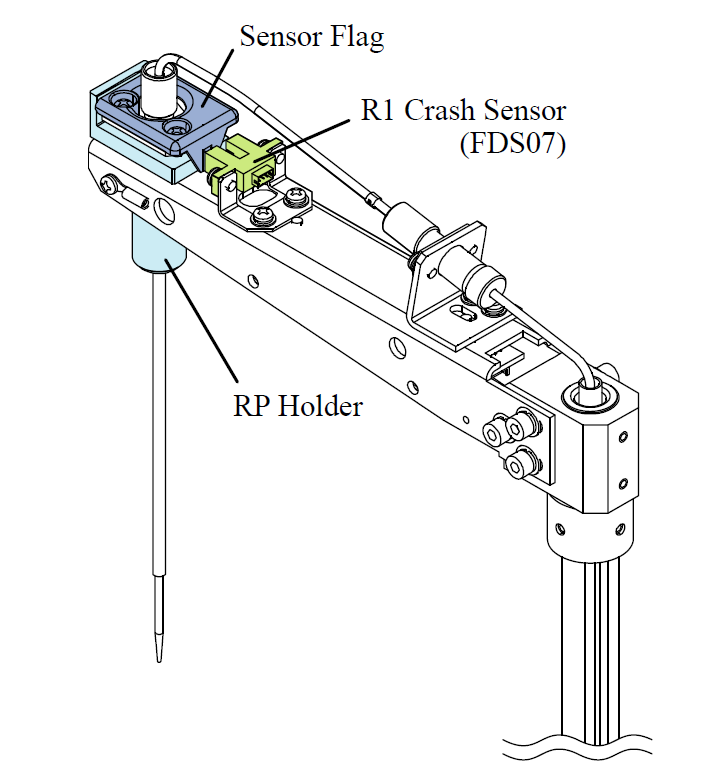 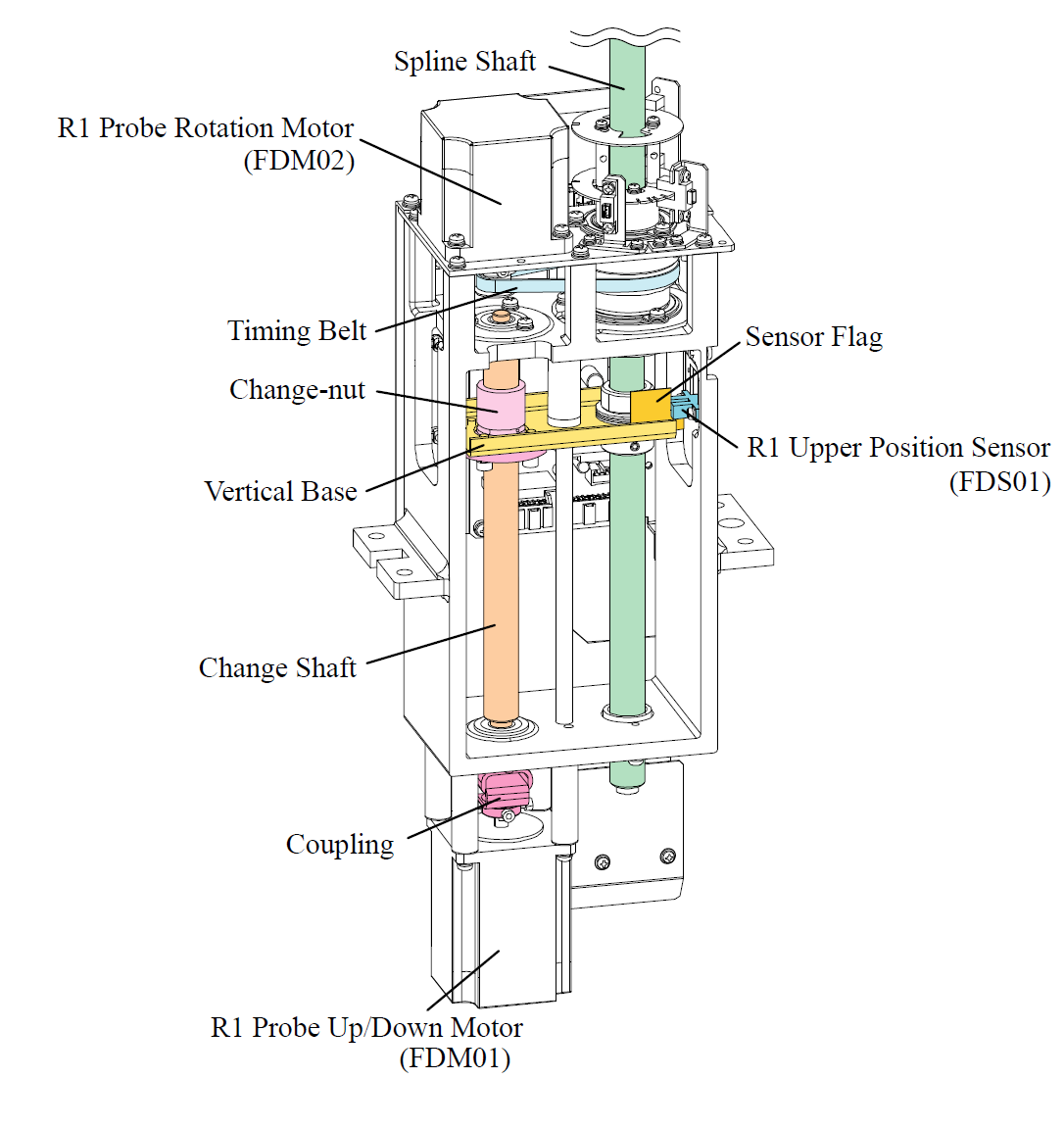
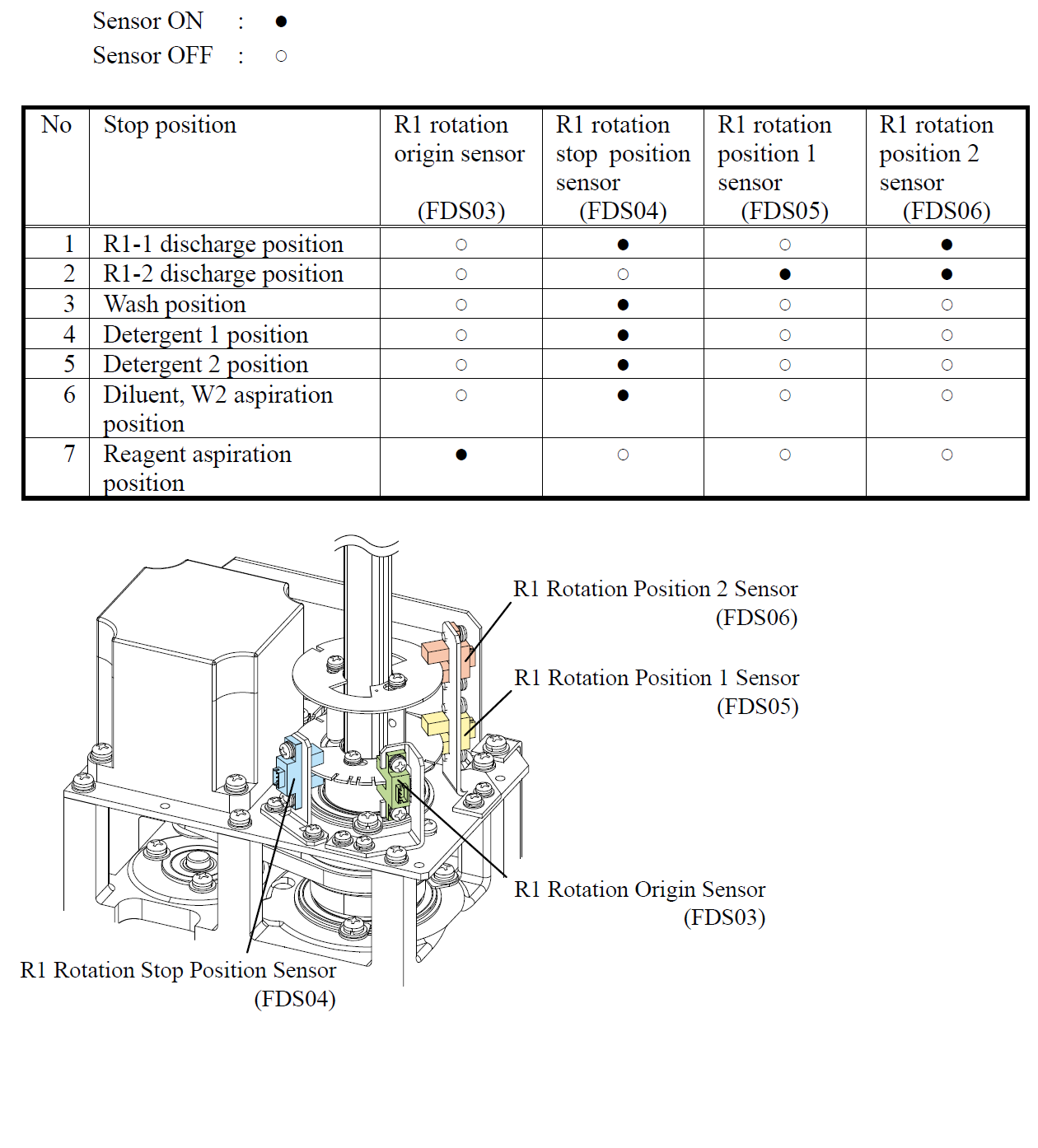
上面是FD01
的结构示意图,看以参照FA单元的看一下,不作解释了。最后一图是FD01在各个位置摆动时,四个摆动传感器的对应关系。下图是FD11的。
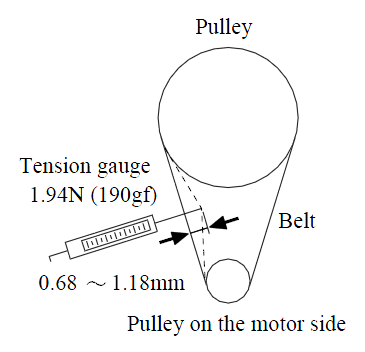
摆动皮带的张紧度检查和调整步骤:
上位传感器的检查调整步骤:
复位FD单元[ R1/2 TRANSFER UNIT [FD]/ Reset ],执行[
R1/2 TRANSFER UNIT [FD]/Up-Down Pulse/ Down
]下降,按诊断开关计数脉冲,UDCD42对应的LED由亮变灭的脉冲范围是24±3个。
UDCD42设置:FD01是DS2 (SW2 = 4, SW1 =
5),FD11是DS2 (SW2 = 4, SW1 = A)。
接着进行下一步检查,复位FD单元[ R1/2 TRANSFER UNIT [FD]/
Reset ],执行[ R1/2 TRANSFER UNIT [FD]/Up-Down
Pulse/ Down ]下降,按诊断开关下降针直到对应的LED变灭,紧接着执行[
R1/2 TRANSFER UNIT [FD]/ Up-Down Pulse/ Up
]上升,按诊断开关计数脉冲数,LED由刚才的灭变亮小于3个脉冲。
上位传感器无法调整,因为机械设计就到此位置了,就算调整上位传感器的高度机械根本上不去,肯定会报错的。所以这种情况厂家建议处理或更换控制板。
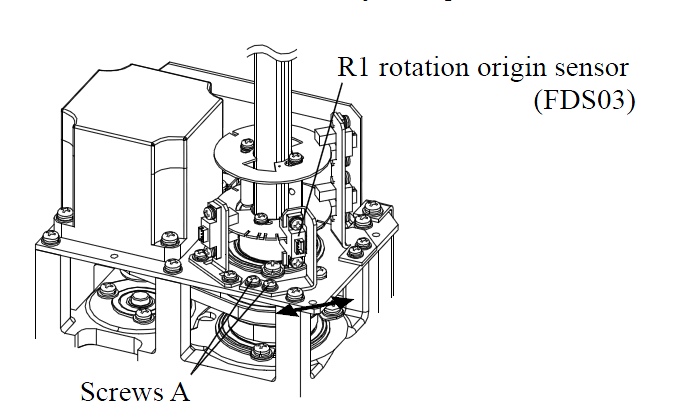
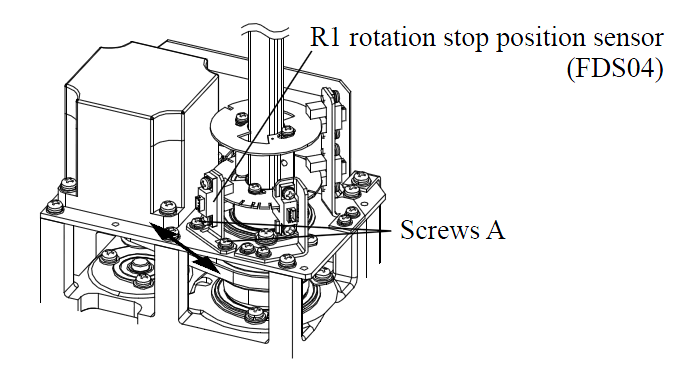
初始位置传感器的检查调整步骤:
复位FD单元[ R1/2 TRANSFER UNIT [FD]/ Reset ],执行[
R1/2 TRANSFER UNIT [FD]/Rotation Pulse/ CW ]
正转,按诊断开关计数脉冲数,UDCD对应的LED由亮变灭的脉冲数范围是10±3个,否则调整初始位置传感器的位置。
UDCD42设置:FD01是DS1 (SW2 = 4, SW1 =
8),FD11是DS1 (SW2 = 4, SW1 = D)。
停止位传感器的检查调整步骤:
复位FD单元[ R1/2 TRANSFER UNIT [FD]/ Reset ],执行[
R1/2 TRANSFER UNIT [FD]/ Rotation Step
]到各个停止位置,执行[ R1/2 TRANSFER UNIT [FD]/
Rotation Pulse/ CW
]正转,按诊断开关计数脉冲数,UDCD对应的LED由亮变灭的脉冲数范围是大于11个。
然后复位FD单元[ R1/2 TRANSFER UNIT [FD]/ Reset
],执行[ R1/2 TRANSFER UNIT [FD]/ Rotation Step
]到各个停止位置,执行[ R1/2 TRANSFER UNIT [FD]/
Rotation Pulse/ CCW
]反转,按诊断开关计数脉冲数,UDCD对应的LED由亮变灭的脉冲数范围是大于11个。
UDCD42设置:FD01是DS2 (SW2 = 4, SW1 =
8),FD11是DS2 (SW2 = 4, SW1 = D)。
接着再复位[ R1/2 TRANSFER UNIT [FD]/ Reset ],执行[
R1/2 TRANSFER UNIT [FD]/ Rotation Step
](FD01摆动到R1-2分配位置,FD11摆动到R2-2分配位置),确认对应的LED一直是灭的。否则调整停止位置传感器的位置。
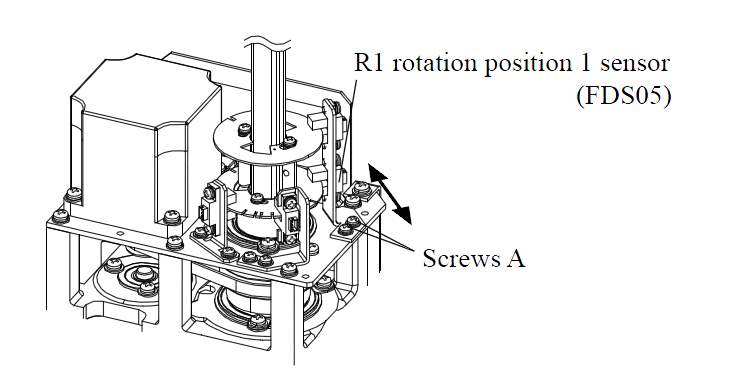
停止位1传感器的检查调整步骤:
复位FD单元[ R1/2 TRANSFER UNIT [FD]/ Reset ],执行[
R1/2 TRANSFER UNIT [FD]/ Rotation Step
]到各个停止位置,执行[ R1/2 TRANSFER UNIT [FD]/
Rotation Pulse/ CW
]正转,按诊断开关计数脉冲数,UDCD对应的LED由亮变灭的脉冲数范围是大于11个。
然后复位FD单元[ R1/2 TRANSFER UNIT [FD]/ Reset
],执行[ R1/2 TRANSFER UNIT [FD]/ Rotation Step
]到各个停止位置,执行[ R1/2 TRANSFER UNIT [FD]/
Rotation Pulse/ CCW
]反转,按诊断开关计数脉冲数,UDCD对应的LED由亮变灭的脉冲数范围是大于11个。
UDCD42设置:FD01是DS3 (SW2 = 4, SW1 =
8),FD11是DS3 (SW2 = 4, SW1 = D)。
接着再复位[ R1/2 TRANSFER UNIT [FD]/ Reset ],执行[
R1/2 TRANSFER UNIT [FD]/ Rotation Step
](FD01摆动到R1-1分配位置,FD11摆动到R2-1分配位置),确认对应的LED一直是灭的。否则调整停止位置传感器的位置。
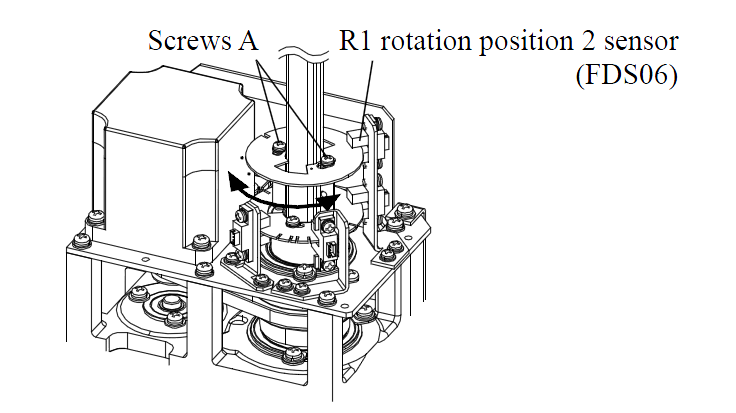
停止位2传感器的检查调整步骤:
复位FD单元[ R1/2 TRANSFER UNIT [FD]/ Reset ],执行[
R1/2 TRANSFER UNIT [FD]/ Rotation Step
]到R1-1分配位置(FD11是到R2-1分配位置),执行[ R1/2 TRANSFER
UNIT [FD]/ Rotation Pulse/ CW
]正转,按诊断开关计数脉冲数,UDCD对应的LED由亮变灭的脉冲数范围是大于11个。
然后复位FD单元[ R1/2 TRANSFER UNIT [FD]/ Reset
],执行[ R1/2 TRANSFER UNIT [FD]/ Rotation Step
]到R1-2分配位置(FD11是到RARE-2 分配位置),执行[ R1/2
TRANSFER UNIT [FD]/ Rotation Pulse/ CCW
]反转,按诊断开关计数脉冲数,UDCD对应的LED由亮变灭的脉冲数范围是大于11个。
UDCD42设置:FD01是DS4 (SW2 = 4, SW1 =
8),FD11是DS4(SW2 = 4, SW1 = D)。
否则调整停止位置传感器的位置。
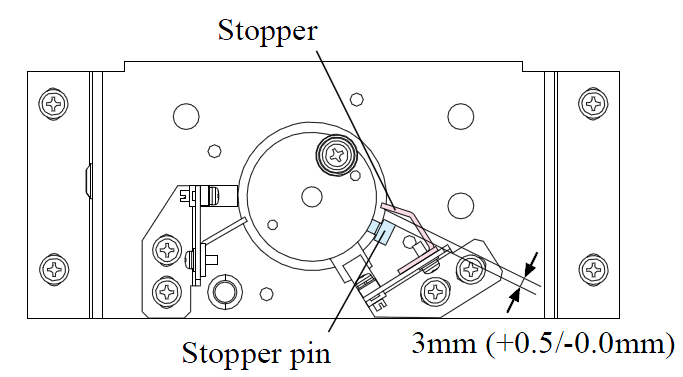
摆动阻挡器位置的检查调整步骤:
复位FD单元[ R1/2 TRANSFER UNIT [FD]/ Reset ],执行[
R1/2 TRANSFER UNIT [FD]/ Rotation Step
]到初始位置,确认阻挡器与皮带轮上的销钉间隙为0.4±0.1mm。然后解除电磁锁定[
R1/2 TRANSFER UNIT [FD]/ Magnet ON/OFF
]手工将销钉与阻挡器接触,确认UDCD42对应的初始位置传感器LED始终保持亮。
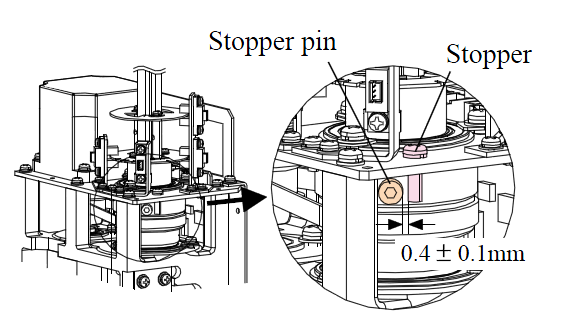
UDCD42设置:FD01是DS1 (SW2 = 4, SW1 =
8),FD11是DS1 (SW2 = 4, SW1 = D)
调整步骤是复位FD单元[ R1/2 TRANSFER UNIT [FD]/ Reset
],执行[ R1/2 TRANSFER UNIT [FD]/ Rotation Step
]到初始位置,松开两个皮带轮上的销钉,调整皮带轮的位置。
试剂针高度的检查调整步骤:
需要测试用的平板和定高器。其实原理就是测试用的平板替代试剂盘的底层转盘,定高器就是最后的试剂瓶底儿的高度,这样做的目的是保证试剂针不会撞击到试剂瓶底儿。
复位试剂盘和试剂针[ R1/2 REFRIGERATOR UNIT [DA]/
Reset]和[ R1/2 TRANSFER UNIT [FD]/ Reset
],取下试剂盘盖和试剂盘,放入测试平板和定高器(在试剂吸取位置),并且取下试剂针(放置高度不对撞坏针),执行[
R1/2 TRANSFER UNIT [FD]/ Up-Down Step
]下降到底。然后小心的插入试剂针,观察针尖是否在定高器高低限制范围内。否则就要调整针臂高度。
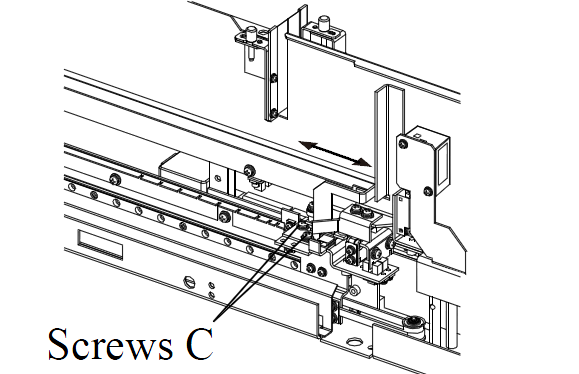
反应杯位置的检查调整步骤:
复位FD单元[ R1/2 TRANSFER UNIT [FD]/ Reset ],执行[
R1/2 TRANSFER UNIT [FD]/ Rotation Step
]摆动到反应杯位置,执行[ R1/2 TRANSFER UNIT [FD]/
Up-Down Step
]下降,观察针尖是否在反应杯的正中心位置,否则调整针臂或整个FD单元的固定位置。螺丝C不起固定作用,不需要拆卸。
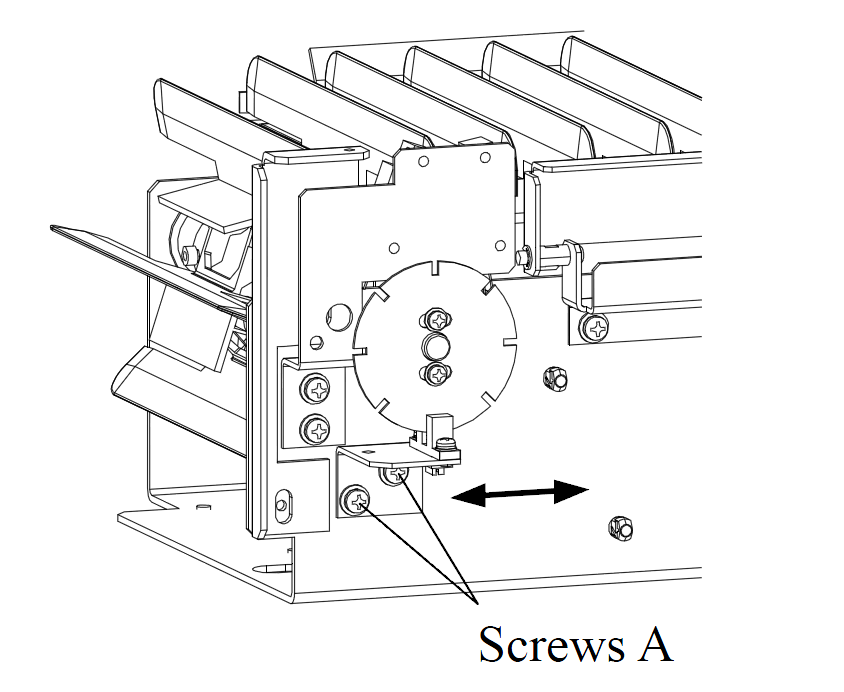
试剂盘吸取位置检查调整步骤:
复位FD单元[ R1/2 TRANSFER UNIT [FD]/ Reset ],执行[
R1/2 TRANSFER UNIT [FD]/ Up-Down Step
]在试剂盘吸取位置下降,观察针尖是否在试剂瓶口的正中心,否则调整试剂盘的位置(螺丝A)或者调整整个试剂仓的固定位置。
冲洗池位置检查调整步骤:
复位FD单元[ R1/2 TRANSFER UNIT [FD]/ Reset ],执行[
R1/2 TRANSFER UNIT [FD]/ Up-Down Step
]在冲洗池位置下降,观察针尖处于冲洗池喷水口的正中心,否则调整冲洗池的位置。
清洗剂位置检查调整步骤:
清洗剂位置是三个,两个一组,单独的一个一组(稀释液),分别在各自的托架上固定,需要分两次检查调整。
复位FD单元[ R1/2 TRANSFER UNIT [FD]/ Reset ],执行[
R1/2 TRANSFER UNIT [FD]/ Rotation Step
]摆动到各在板试剂瓶,执行[ R1/2 TRANSFER UNIT [FD]/
Up-Down Step
]下降试剂针,观察针尖在各自的试剂瓶口处于正中心,否则调整各自清洗剂瓶支架的位置。
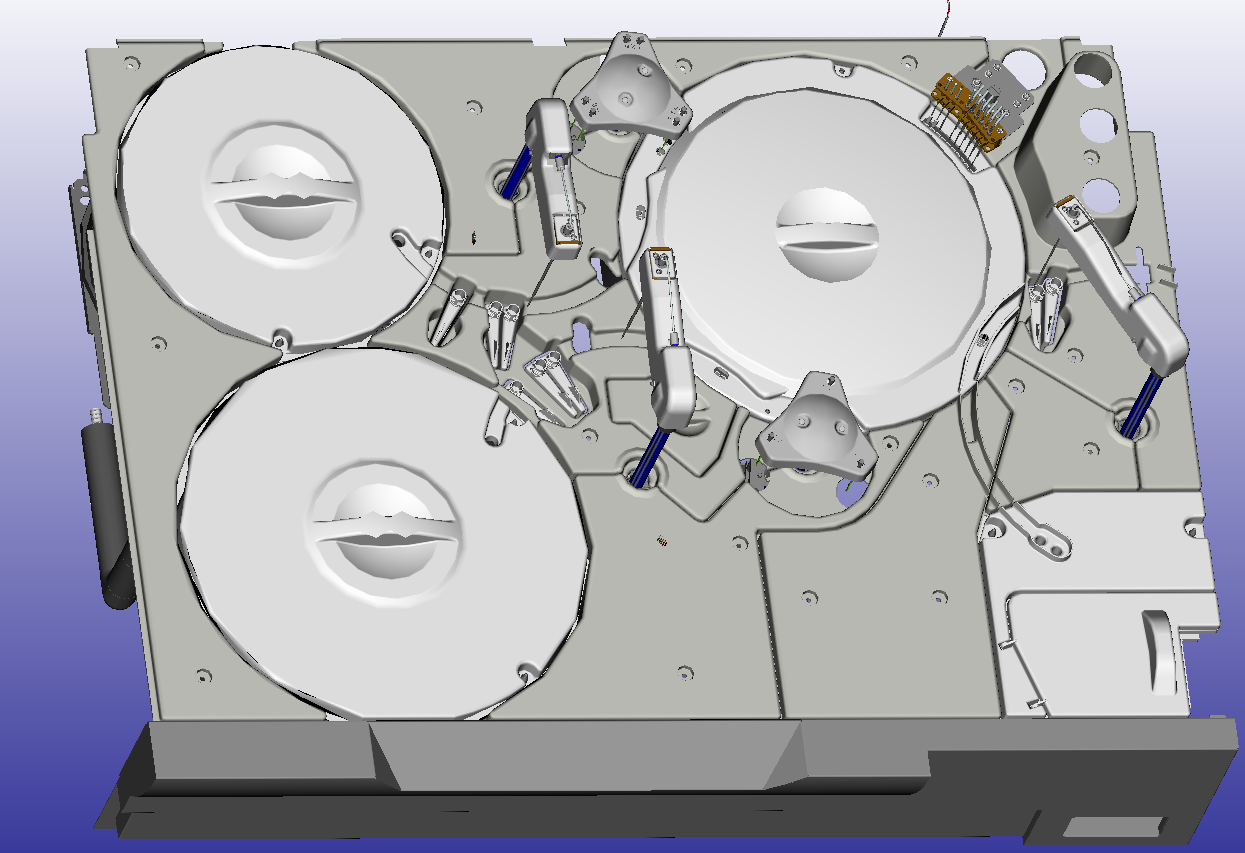
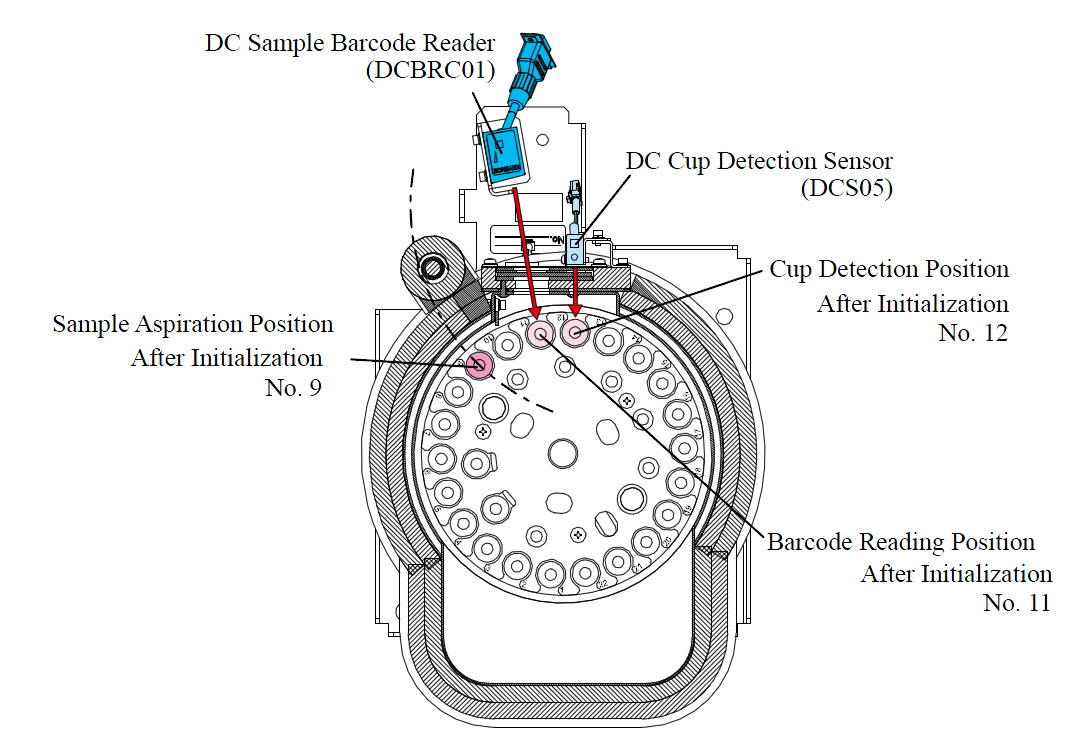
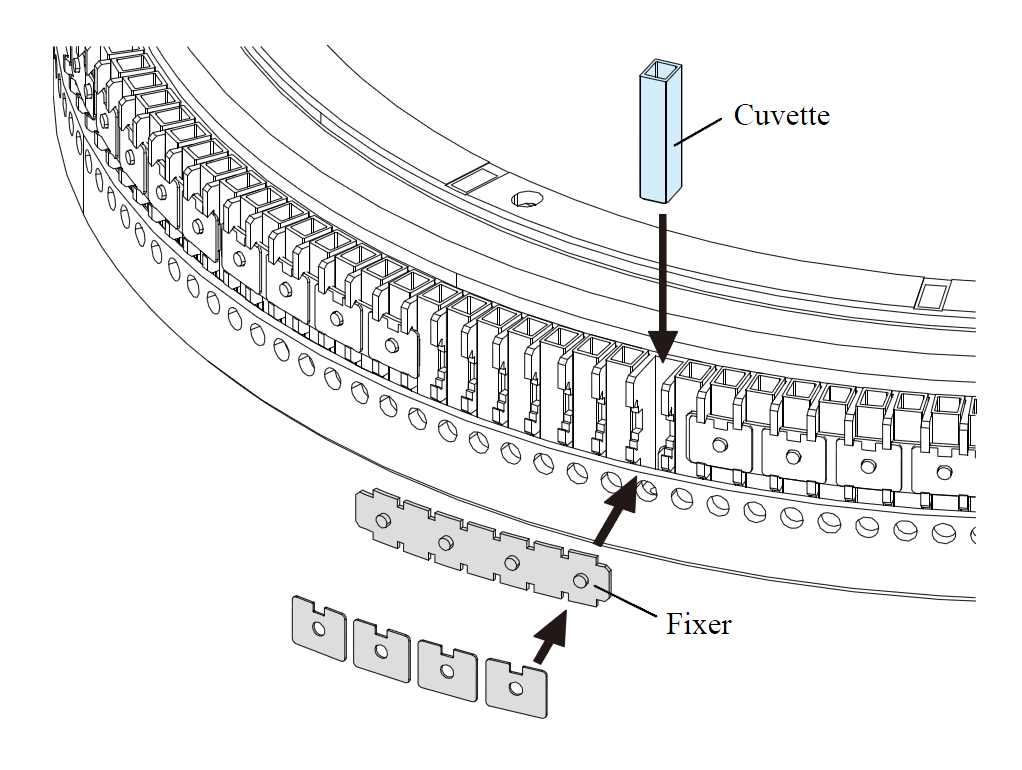
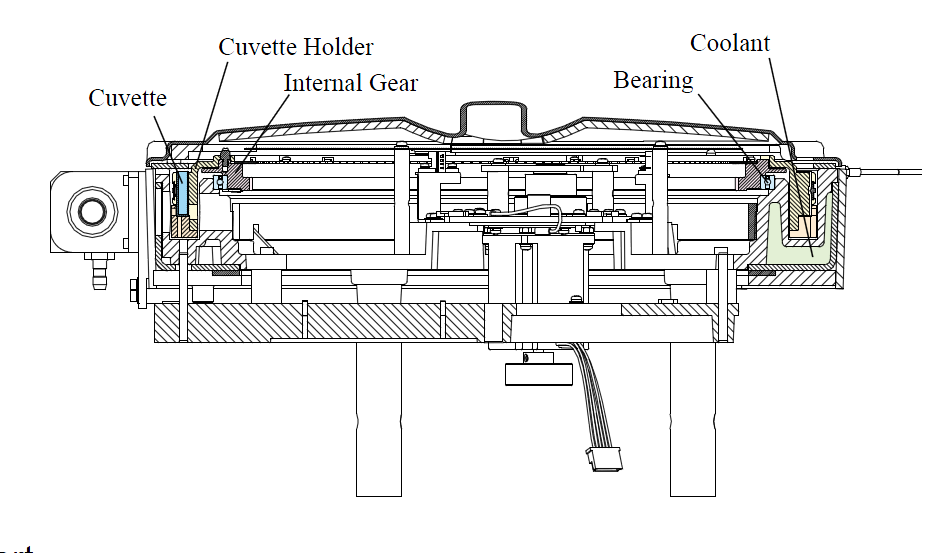
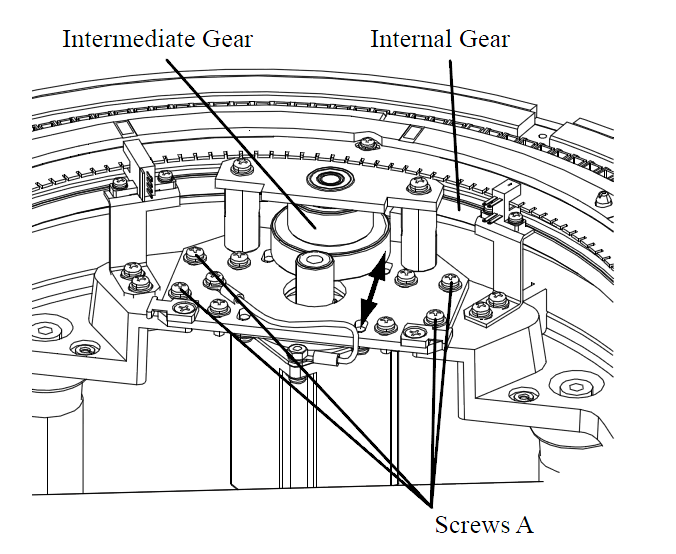
GA单元是反应盘单元,包括反应杯和杯架、旋转机构、灯室组成。 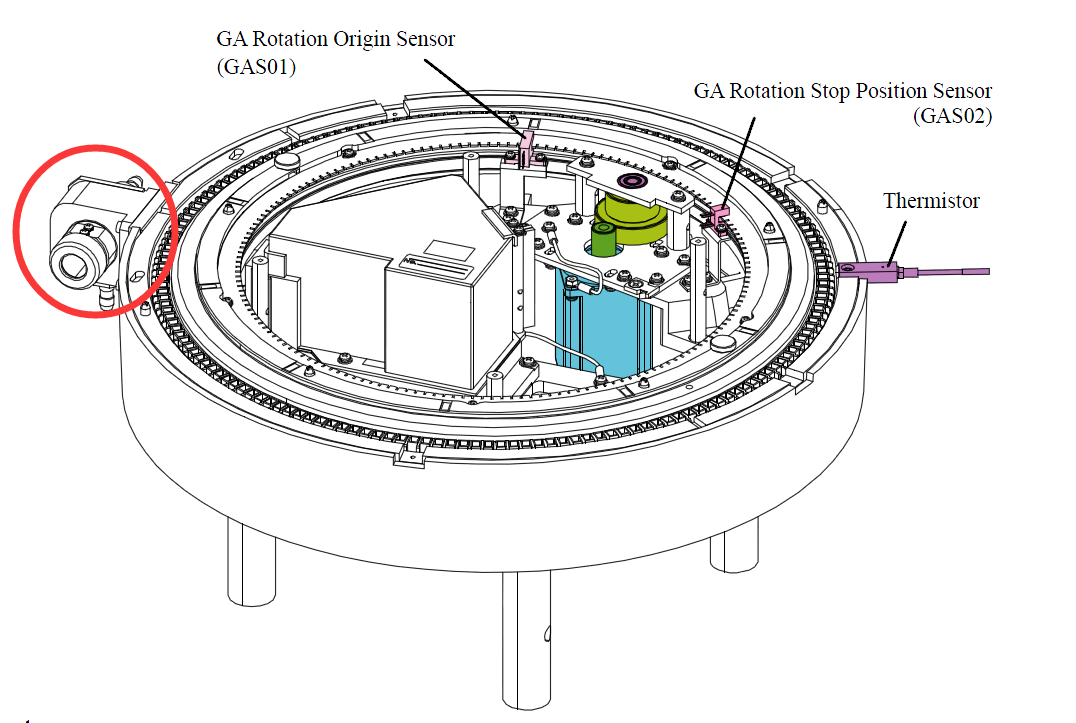
红圈处是灯室,两个位置传感器GAS01初始位置传感器,GAS02停止位置传感器,还有一个反应盘温度传感器。反映盘的码盘在反应盘支架下面,与两个位置传感器接触并被监测。
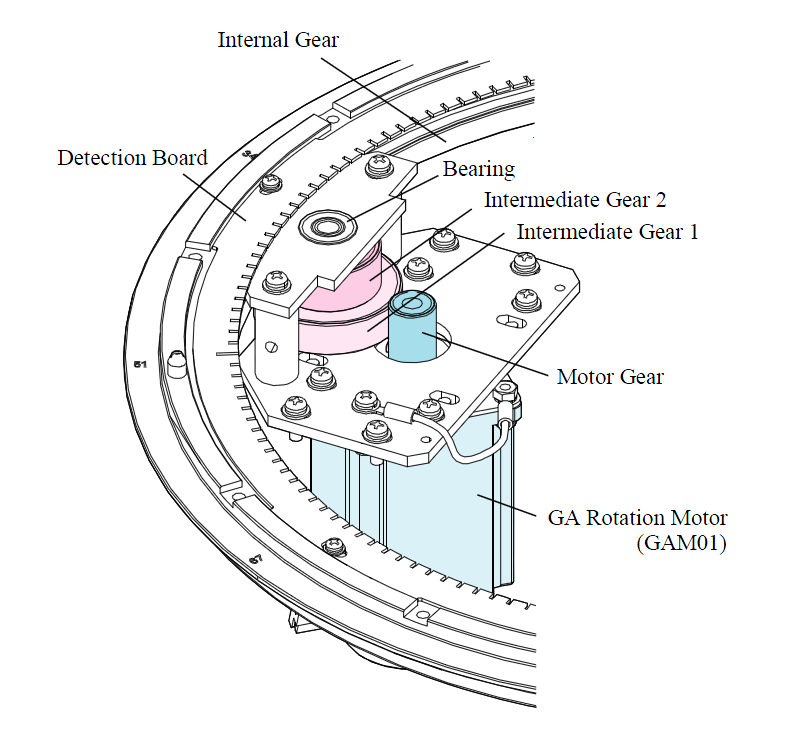
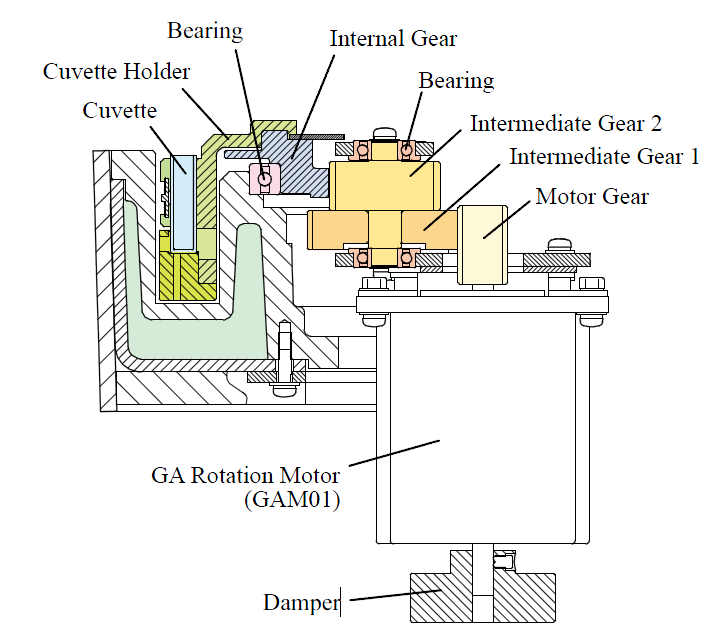
马达带动主齿轮与从动齿轮啮合,带轮反应盘的大齿轮运转。从动齿轮通过轴承安装在上下基板上。这三个齿轮的啮合处需要润滑。
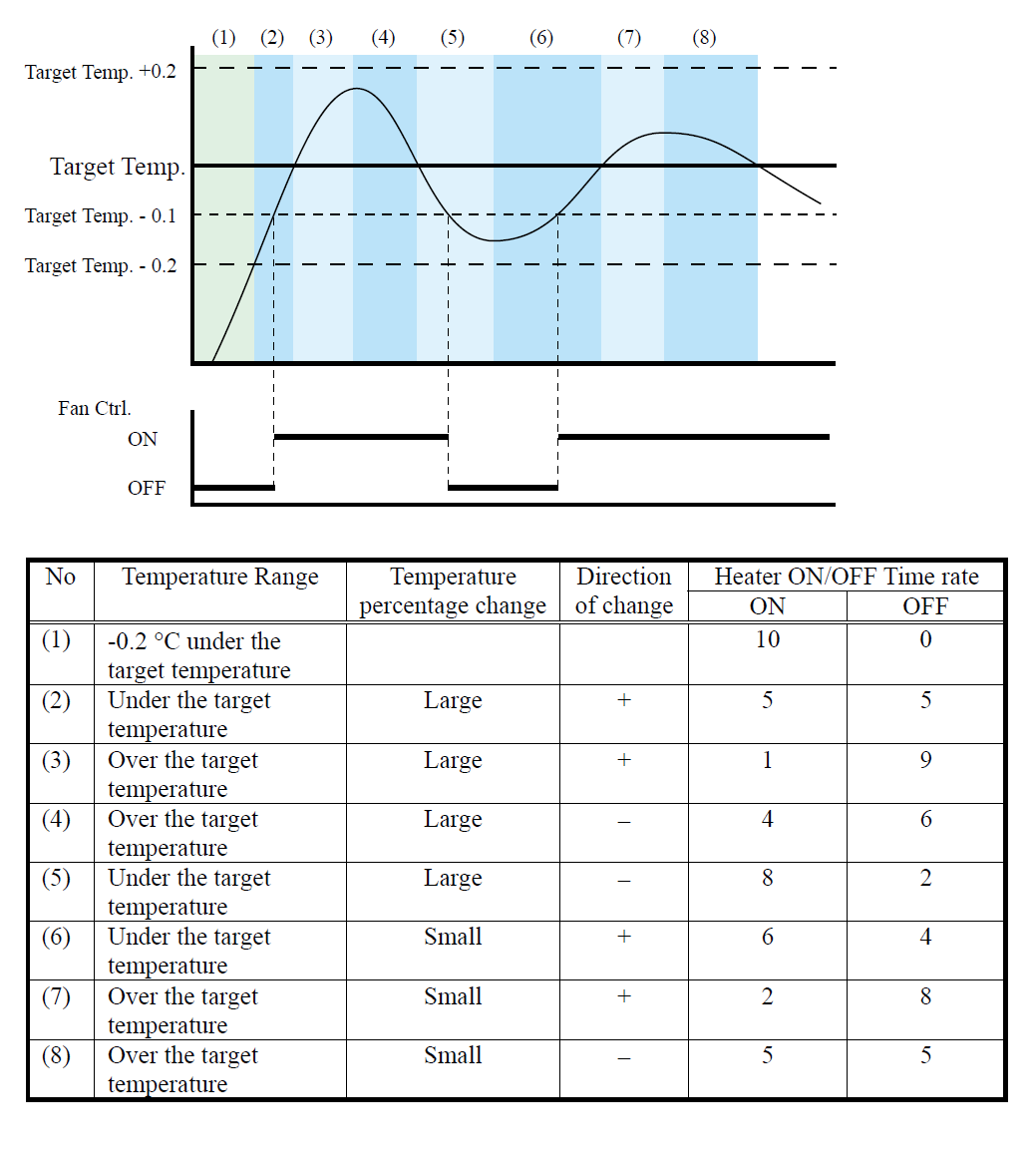
下图是反应盘温度控制与加热器开关的关系示意图:
下图是冲洗站加热器对冲洗用的稀释碱液和冲洗水加热时的计算关系示意图:
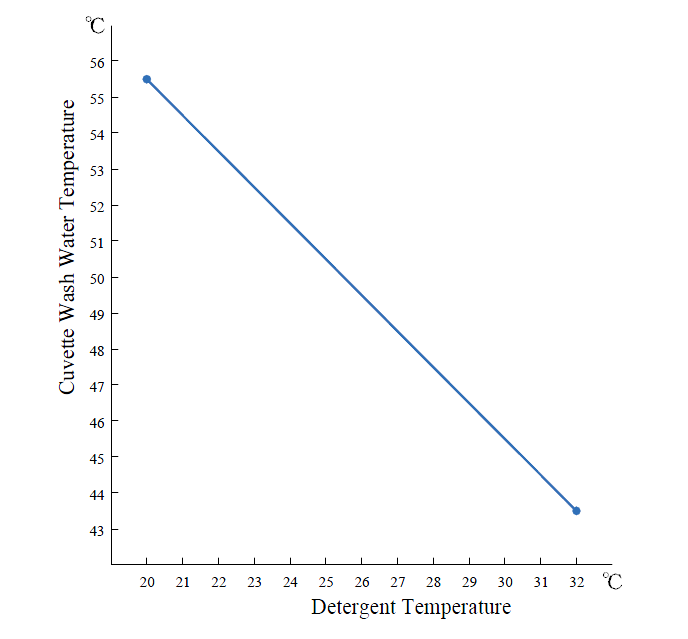
冲洗水的温度=75.5℃-稀释碱液的温度。
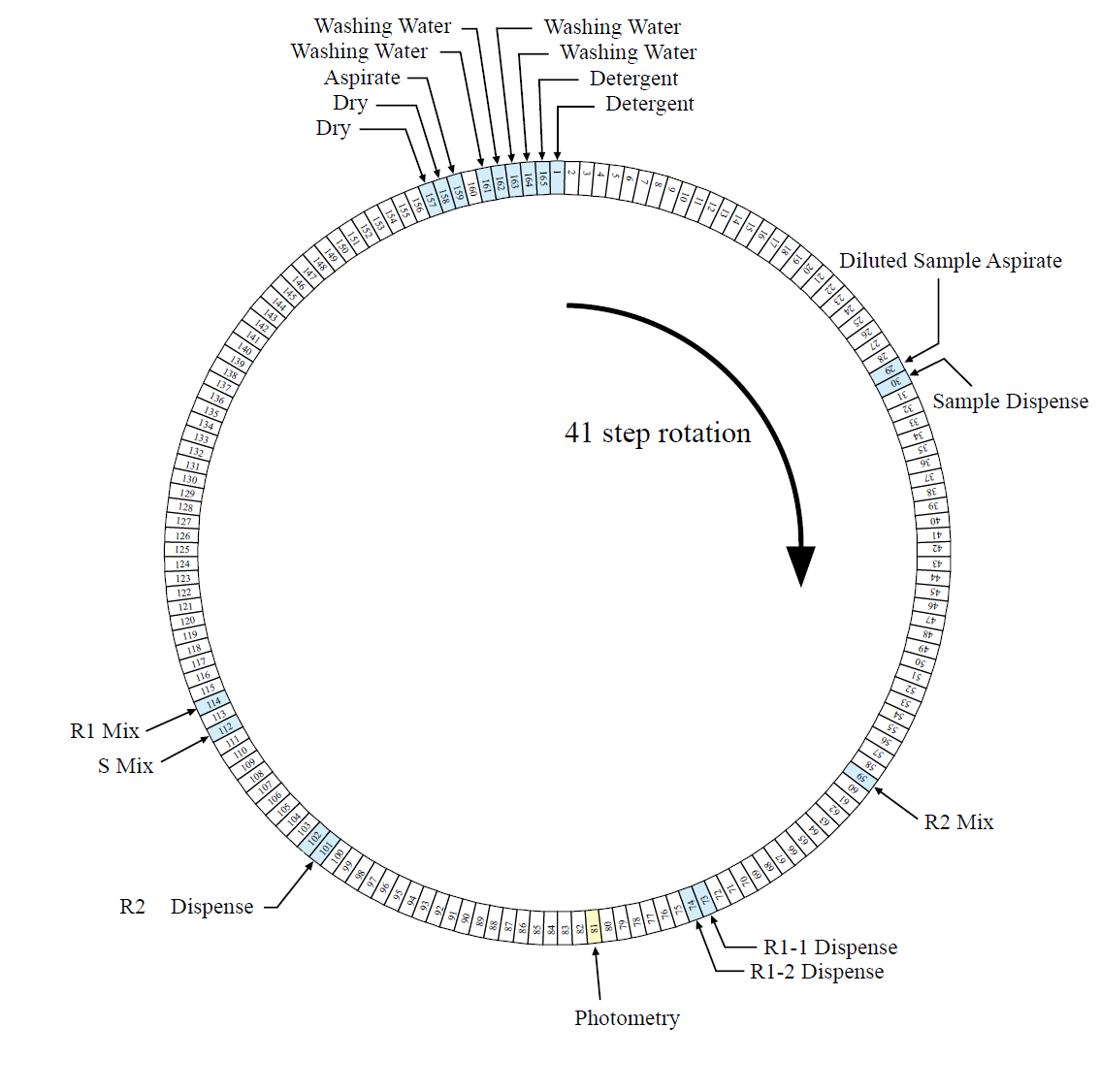
反应盘每圈18秒,其中停止四次,加样四次,每次加样4.5秒,所以是800速。反应杯一共165个,每次停止间隔是41个,每圈旋转164个反应杯位置,下图是复位状态下,各个位置的示意图:
齿轮晃量检查调整步骤:
从动齿轮不能有晃量,诊断菜单中解除电磁锁定[ INCUBATOR
UNIT [GA]/ Magnet ON/OFF
],手工轻轻移动反应盘,但不要带动从动齿轮移动,如果出现晃量就要从动齿轮固定基板调整晃量。如果移动反应盘,从动齿轮跟着旋转,就说明没有晃量。
再检查主动齿轮的晃量, [ INCUBATOR UNIT
[GA]/ Reset
],轻轻转到从动齿轮,观察主动齿轮有无晃量,如果有则调整马达固定位置。 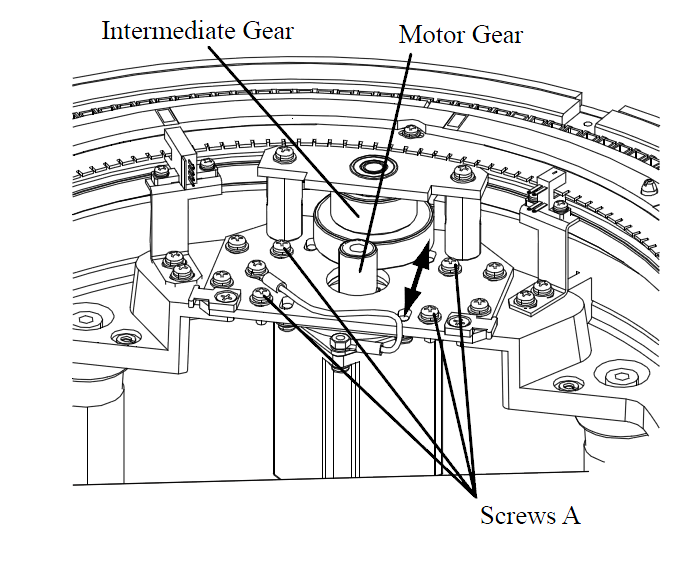
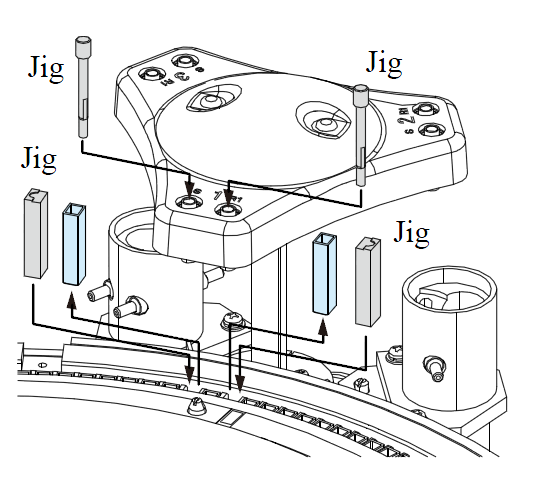
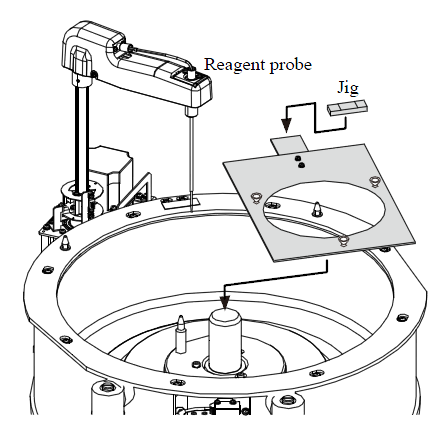
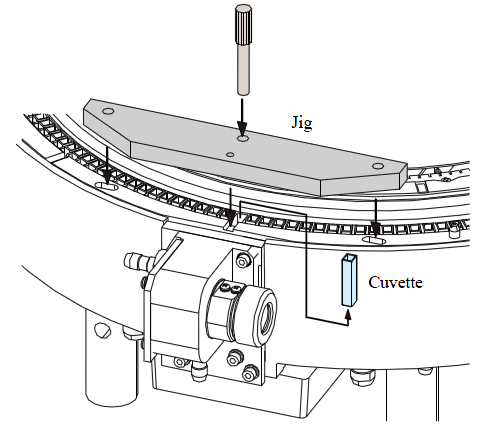
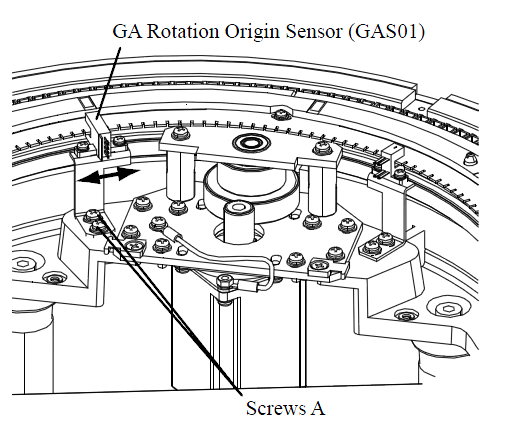
初始位置传感器检查调整步骤:
需要专门的夹具和假杯。
取出164, 123, 81, 40四个反应杯,复位反应盘[
INCUBATOR UNIT [GA]/ Reset
],放入夹具,执行[ INCUBATOR UNIT [GA]/
Rotation Step/ CW
]一次旋转41个反应杯位置,直到将四个拿掉反应杯的位置都依序到达光度计位置。这时插入假杯,如果顺利插入则说明位置检查初步正确还要进行下一步检查,否则先调整初始位置传感器位置。
拿掉假杯和夹具,放回原来的反应杯,执行反应盘复位[
INCUBATOR UNIT [GA]/ Reset
],再执行[ INCUBATOR UNIT [GA]/
Rotation Pulse/ CW
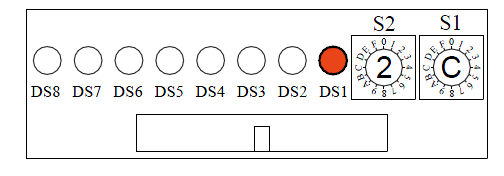
]正转,按诊断开关开始计数脉冲数,确认UDCD42的LEDDS1
(SW2 = 6, SW1 =
4)由亮变灭的脉冲范围在10-20个之间,否则调整初始位置传感器的位置。
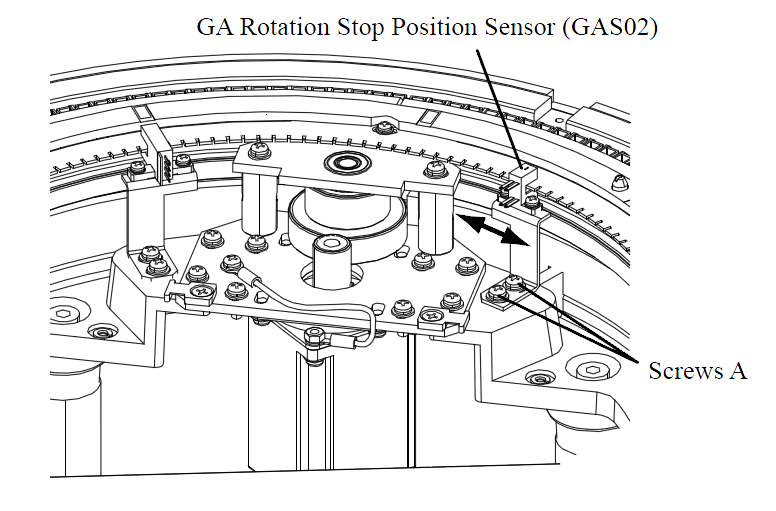
停止位置传感器的检查调整步骤:
复位反应盘[ INCUBATOR UNIT [GA]/
Reset ],执行[ INCUBATOR UNIT [GA]/
Rotation Pulse/ CW
]正转,按诊断开关计数脉冲数,UDCD42的LED,DS2
(SW2 = 6, SW1 =
4)由灭变亮的脉冲数范围是大于10个。
再次位反应盘[ INCUBATOR UNIT [GA]/
Reset ],执行[ INCUBATOR UNIT [GA]/
Rotation Pulse/ CCW
]反转,按诊断开关计数脉冲数,UDCD42的LED,DS2
(SW2 = 6, SW1 =
4)由灭变亮的脉冲数范围是大于10个。
接着复位反应盘[ INCUBATOR UNIT [GA]/
Reset ],执行[ INCUBATOR UNIT [GA]/
Rotation Step/ CW
]正转旋转41个反应杯位置,按按诊断开关计数脉冲数,UDCD42的LED,DS2
(SW2 = 6, SW1 =
4)由灭变亮的脉冲数范围是大于10个。
继续复位反应盘[ INCUBATOR UNIT [GA]/
Reset ],执行[ INCUBATOR UNIT [GA]/
Rotation Step/ CW
]正转旋转82个反应杯位置,按按诊断开关计数脉冲数,UDCD42的LED,DS2
(SW2 = 6, SW1 =
4)由灭变亮的脉冲数范围是大于10个。
继续复位反应盘[ INCUBATOR UNIT [GA]/
Reset ],执行[ INCUBATOR UNIT [GA]/
Rotation Step/ CW
]正转旋转123个反应杯位置,按按诊断开关计数脉冲数,UDCD42的LED,DS2
(SW2 = 6, SW1 =
4)由灭变亮的脉冲数范围是大于10个。
否则调整停止位传感器的位置。
GA单元是反应盘单元,包括反应杯和杯架、旋转机构、灯室组成。
红圈处是灯室,两个位置传感器GAS01初始位置传感器,GAS02停止位置传感器,还有一个反应盘温度传感器。反映盘的码盘在反应盘支架下面,与两个位置传感器接触并被监测。
马达带动主齿轮与从动齿轮啮合,带轮反应盘的大齿轮运转。从动齿轮通过轴承安装在上下基板上。这三个齿轮的啮合处需要润滑。
下图是反应盘温度控制与加热器开关的关系示意图:
下图是冲洗站加热器对冲洗用的稀释碱液和冲洗水加热时的计算关系示意图:
冲洗水的温度=75.5℃-稀释碱液的温度。
反应盘每圈18秒,其中停止四次,加样四次,每次加样4.5秒,所以是800速。反应杯一共165个,每次停止间隔是41个,每圈旋转164个反应杯位置,下图是复位状态下,各个位置的示意图:
齿轮晃量检查调整步骤:
从动齿轮不能有晃量,诊断菜单中解除电磁锁定[
INCUBATOR UNIT [GA]/
Magnet ON/OFF
],手工轻轻移动反应盘,但不要带动从动齿轮移动,如果出现晃量就要从动齿轮固定基板调整晃量。如果移动反应盘,从动齿轮跟着旋转,就说明没有晃量。
再检查主动齿轮的晃量, [
INCUBATOR UNIT [GA]/
Reset
],轻轻转到从动齿轮,观察主动齿轮有无晃量,如果有则调整马达固定位置。
初始位置传感器检查调整步骤:
需要专门的夹具和假杯。
取出164, 123, 81,
40四个反应杯,复位反应盘[
INCUBATOR UNIT [GA]/
Reset ],放入夹具,执行[
INCUBATOR UNIT [GA]/
Rotation Step/ CW
]一次旋转41个反应杯位置,直到将四个拿掉反应杯的位置都依序到达光度计位置。这时插入假杯,如果顺利插入则说明位置检查初步正确还要进行下一步检查,否则先调整初始位置传感器位置。
拿掉假杯和夹具,放回原来的反应杯,执行反应盘复位[
INCUBATOR UNIT [GA]/
Reset ],再执行[
INCUBATOR UNIT [GA]/
Rotation Pulse/ CW
]正转,按诊断开关开始计数脉冲数,确认UDCD42的LEDDS1
(SW2 = 6, SW1 =
4)由亮变灭的脉冲范围在10-20个之间,否则调整初始位置传感器的位置。
停止位置传感器的检查调整步骤:
复位反应盘[ INCUBATOR
UNIT [GA]/ Reset
],执行[ INCUBATOR UNIT
[GA]/ Rotation
Pulse/ CW
]正转,按诊断开关计数脉冲数,UDCD42的LED,DS2
(SW2 = 6, SW1 =
4)由灭变亮的脉冲数范围是大于10个。
再次位反应盘[ INCUBATOR
UNIT [GA]/ Reset
],执行[ INCUBATOR UNIT
[GA]/ Rotation
Pulse/ CCW
]反转,按诊断开关计数脉冲数,UDCD42的LED,DS2
(SW2 = 6, SW1 =
4)由灭变亮的脉冲数范围是大于10个。
接着复位反应盘[ INCUBATOR
UNIT [GA]/ Reset
],执行[ INCUBATOR UNIT
[GA]/ Rotation Step/
CW
]正转旋转41个反应杯位置,按按诊断开关计数脉冲数,UDCD42的LED,DS2
(SW2 = 6, SW1 =
4)由灭变亮的脉冲数范围是大于10个。
继续复位反应盘[ INCUBATOR
UNIT [GA]/ Reset
],执行[ INCUBATOR UNIT
[GA]/ Rotation Step/
CW
]正转旋转82个反应杯位置,按按诊断开关计数脉冲数,UDCD42的LED,DS2
(SW2 = 6, SW1 =
4)由灭变亮的脉冲数范围是大于10个。
继续复位反应盘[ INCUBATOR
UNIT [GA]/ Reset
],执行[ INCUBATOR UNIT
[GA]/ Rotation Step/
CW
]正转旋转123个反应杯位置,按按诊断开关计数脉冲数,UDCD42的LED,DS2
(SW2 = 6, SW1 =
4)由灭变亮的脉冲数范围是大于10个。
否则调整停止位传感器的位置。
|
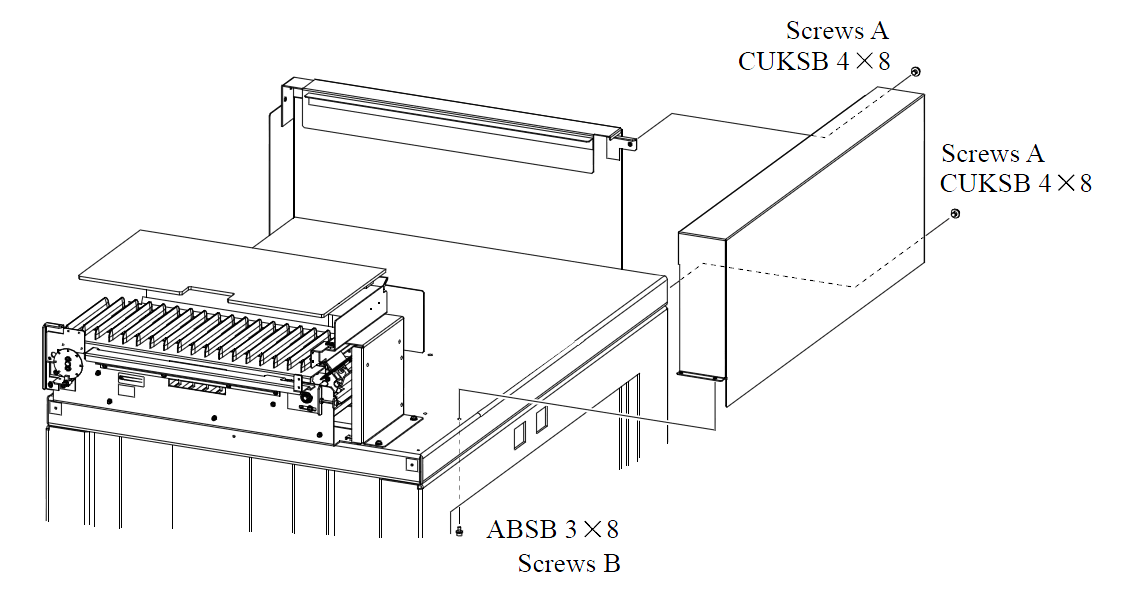
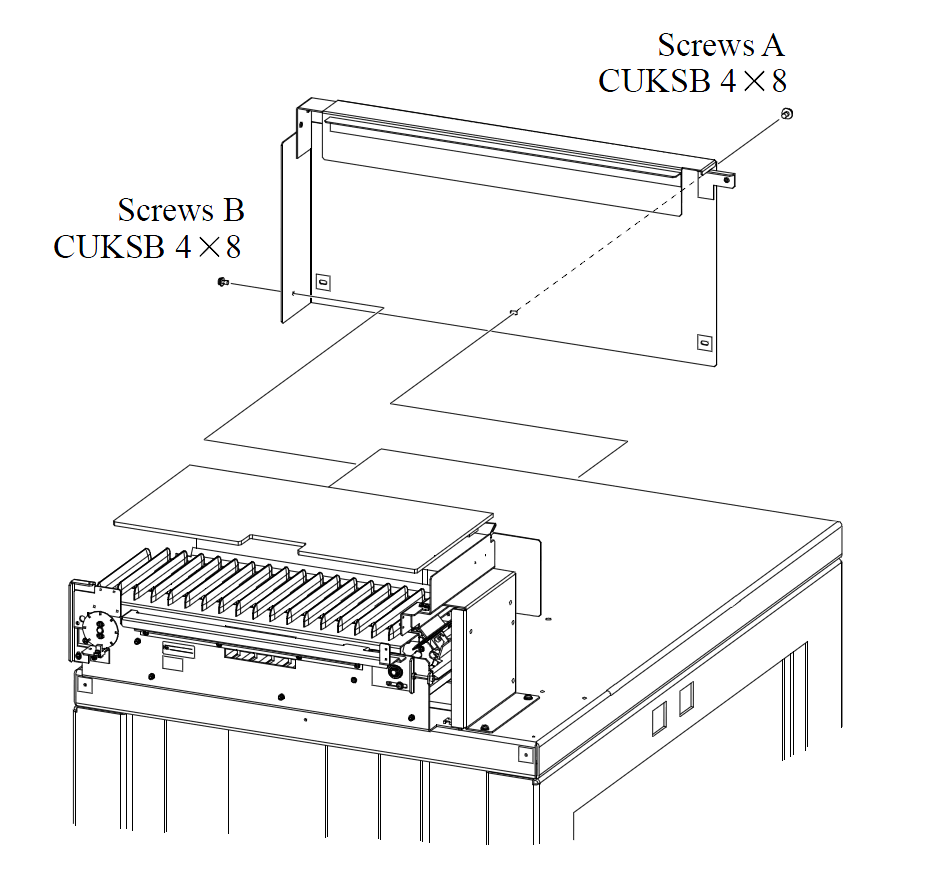
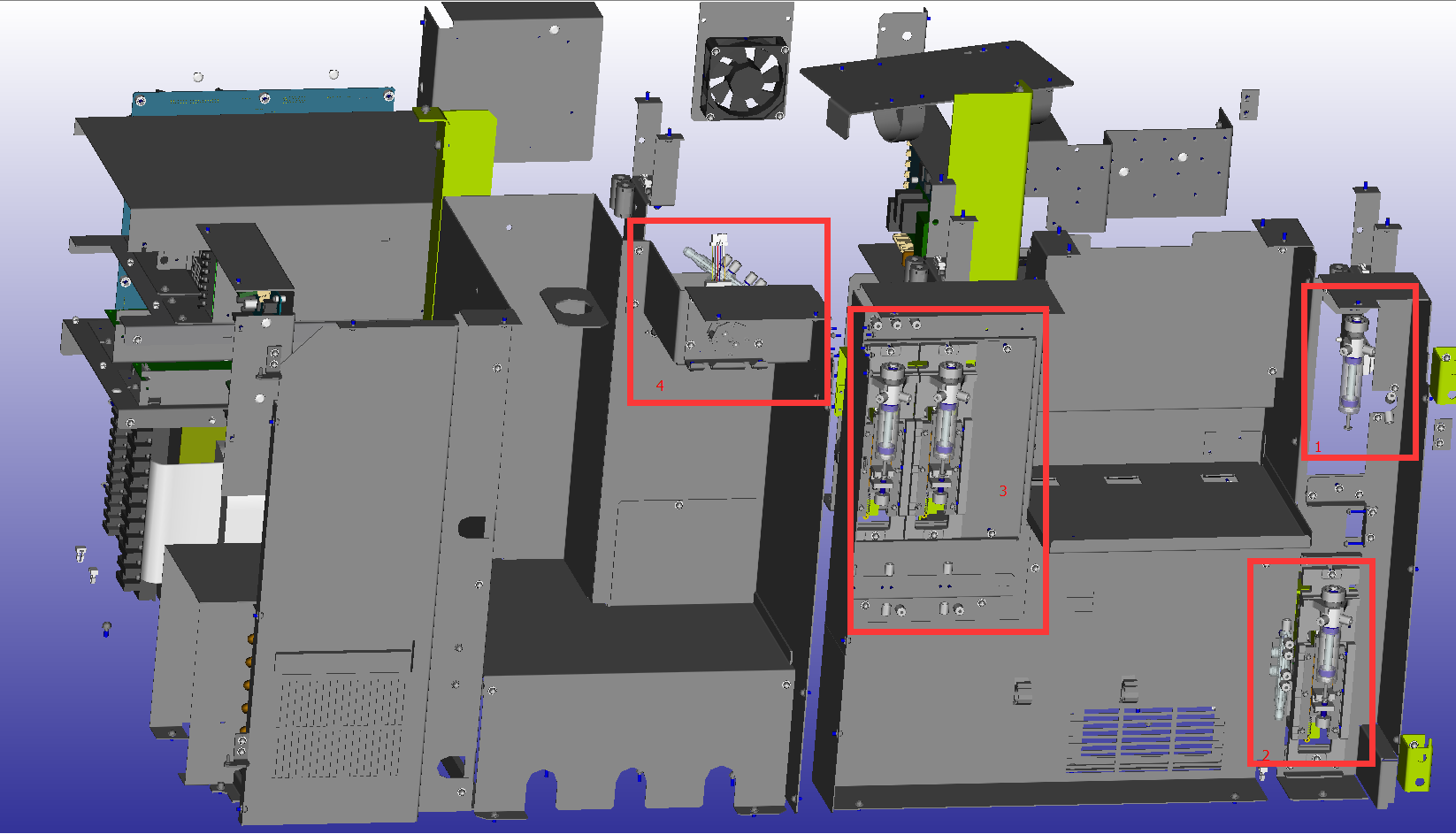
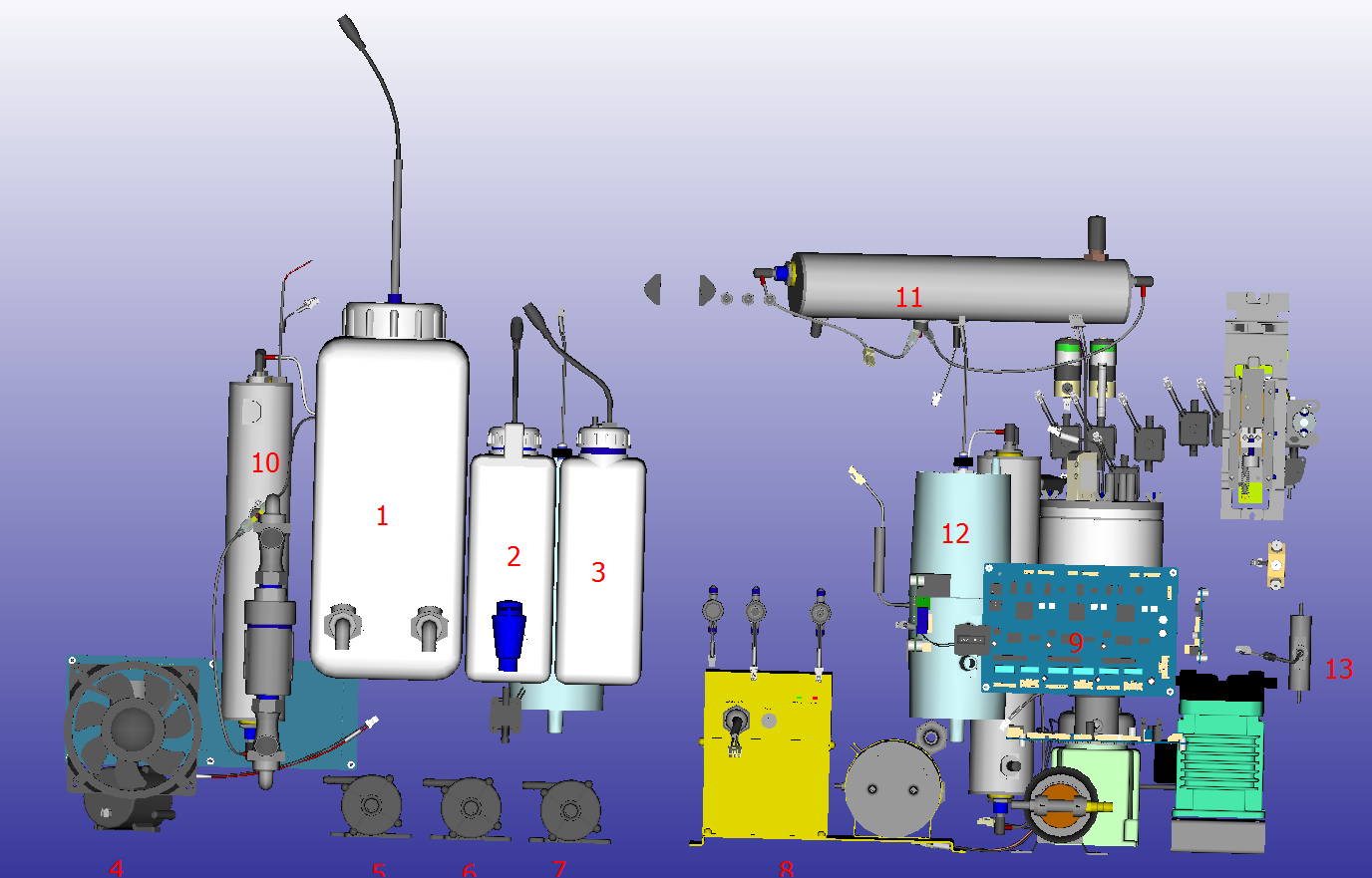
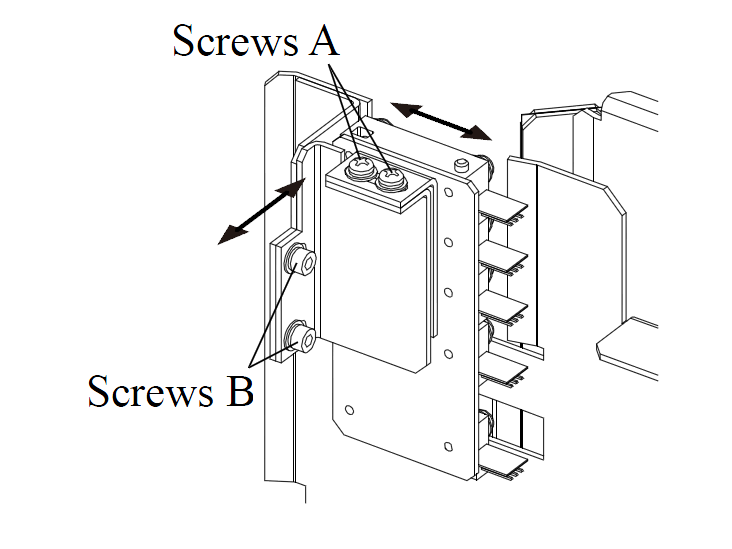
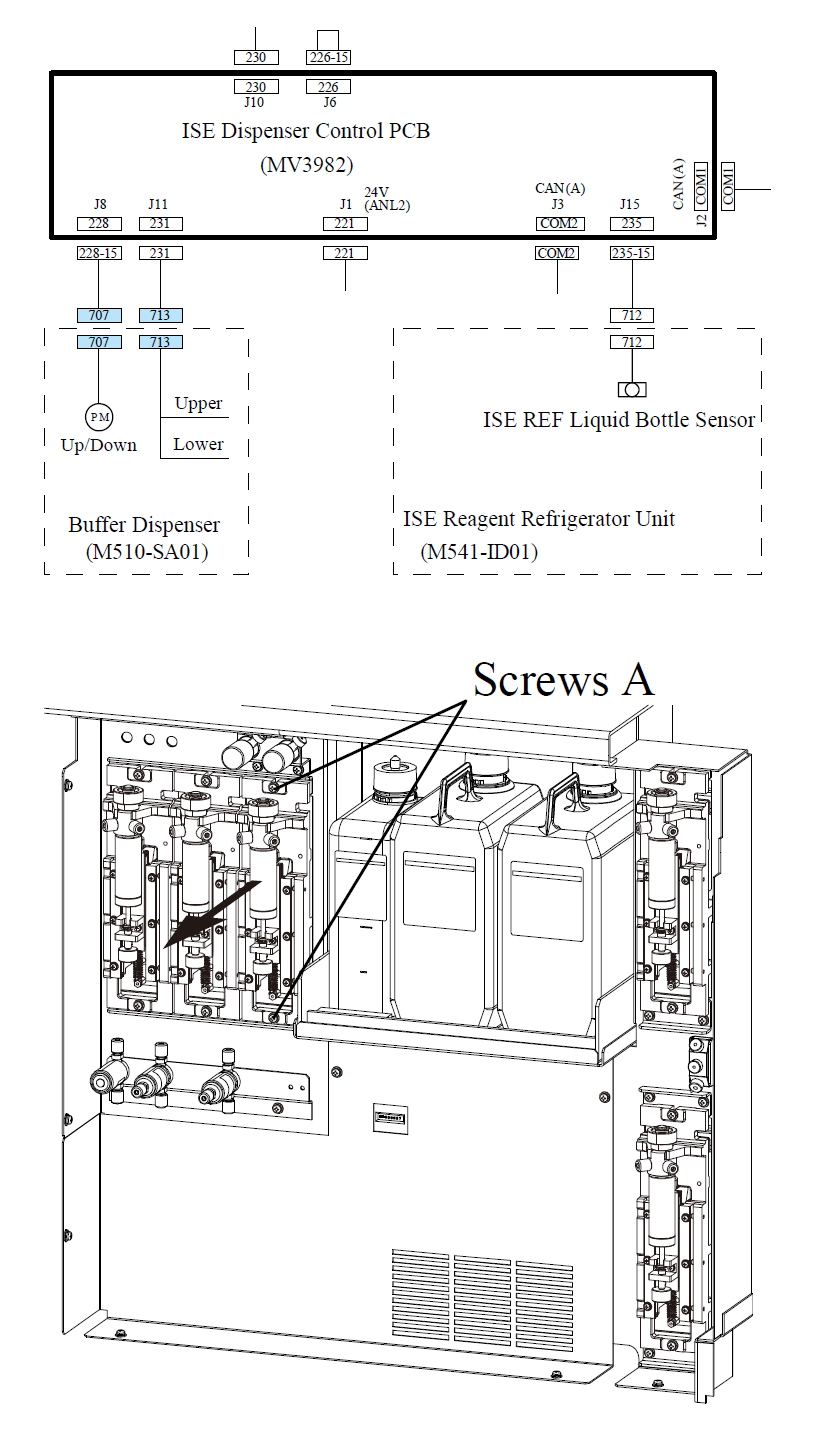
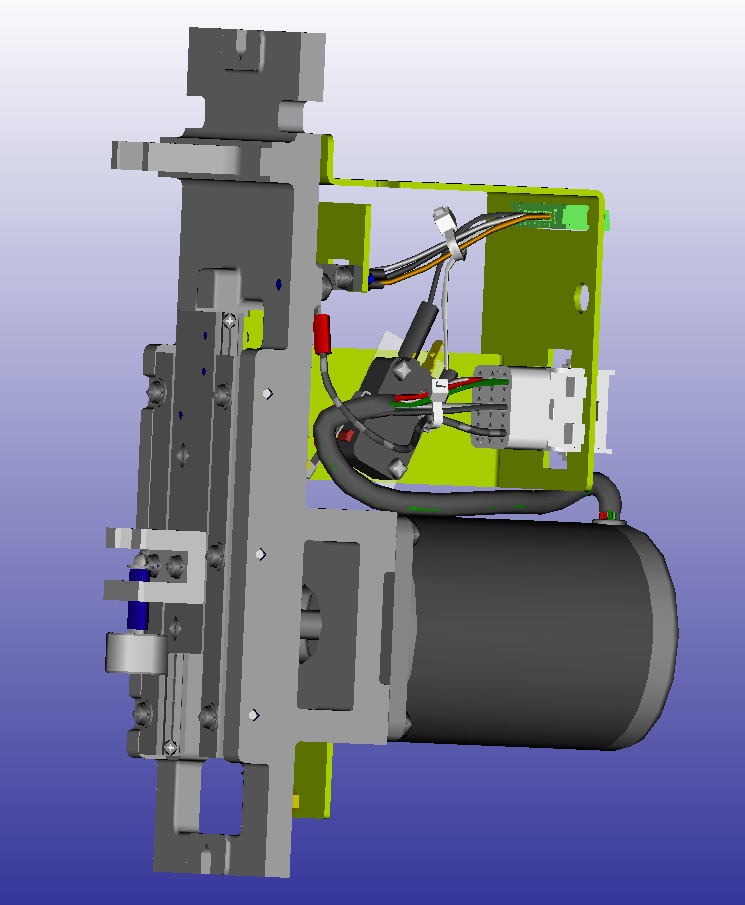
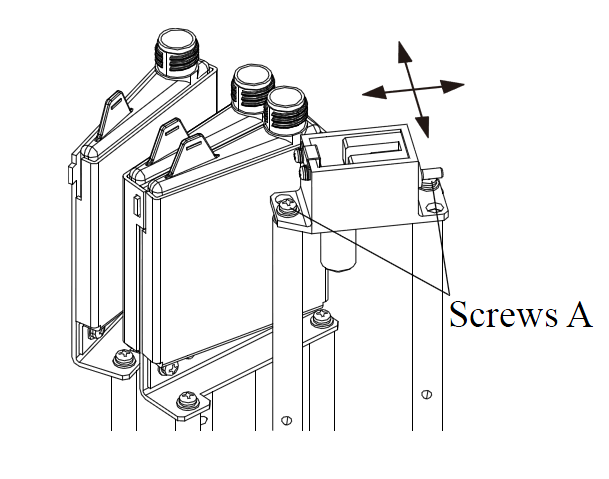
ISE单元是电解质单元,如果后来选配的,安装的时候会带有下面的两套组件,如果装机时就有的,则已经安装上去了。 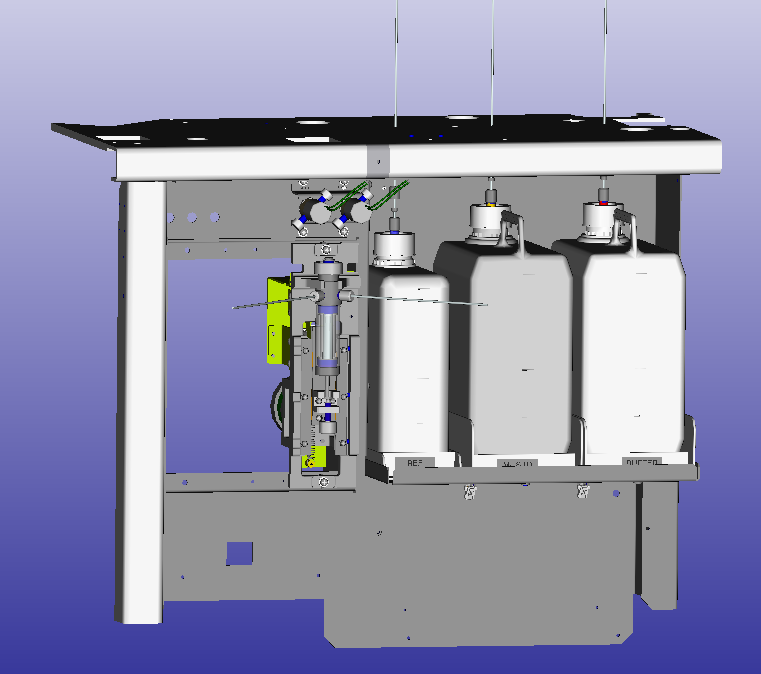 
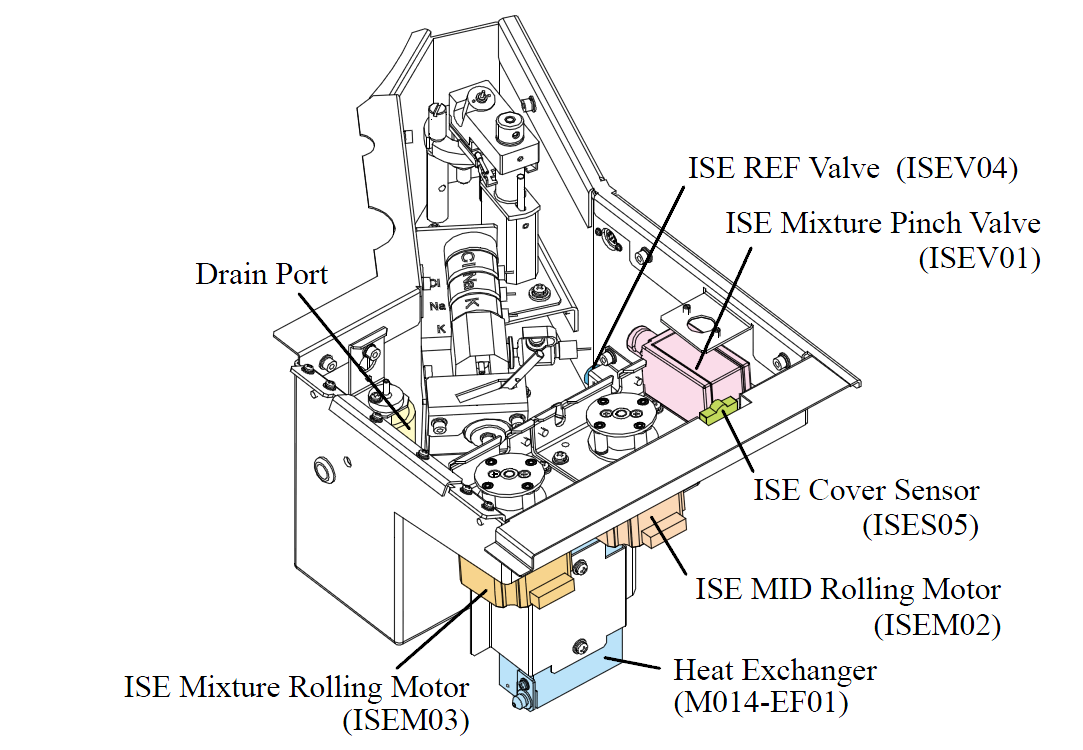
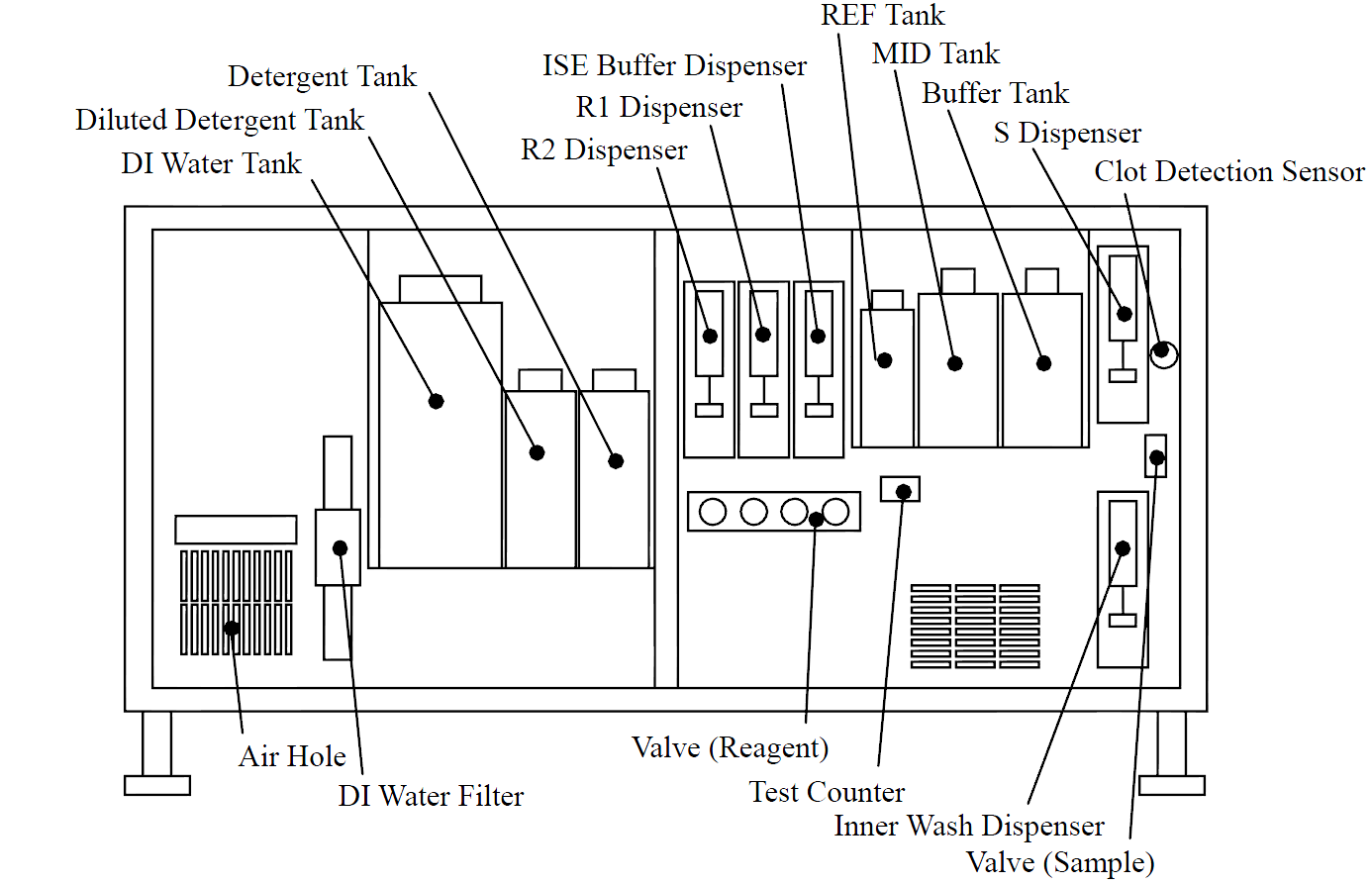
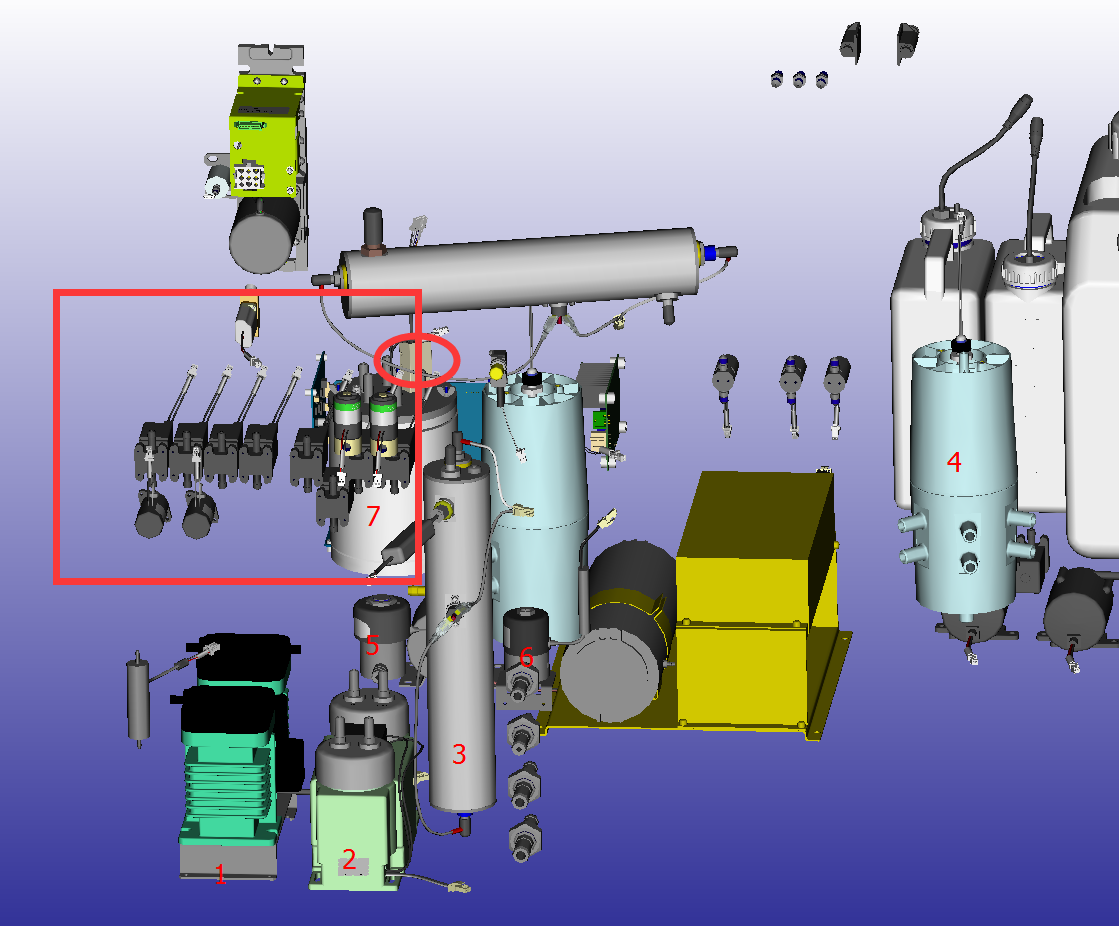
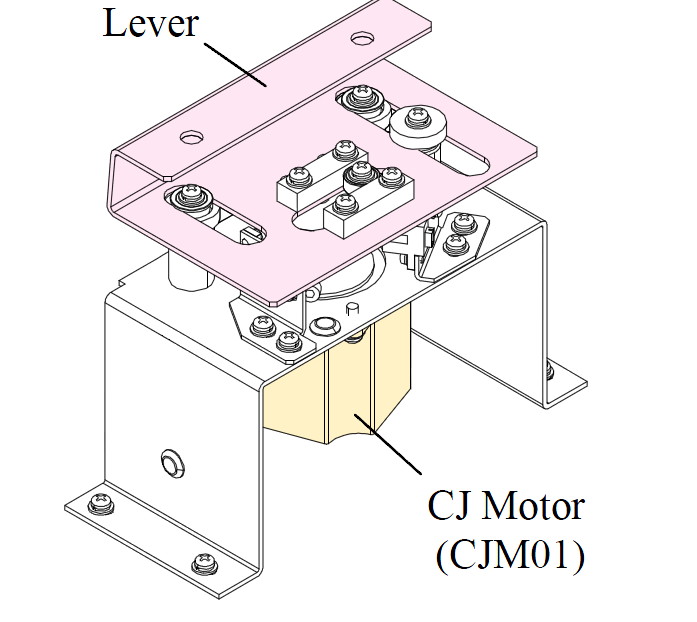
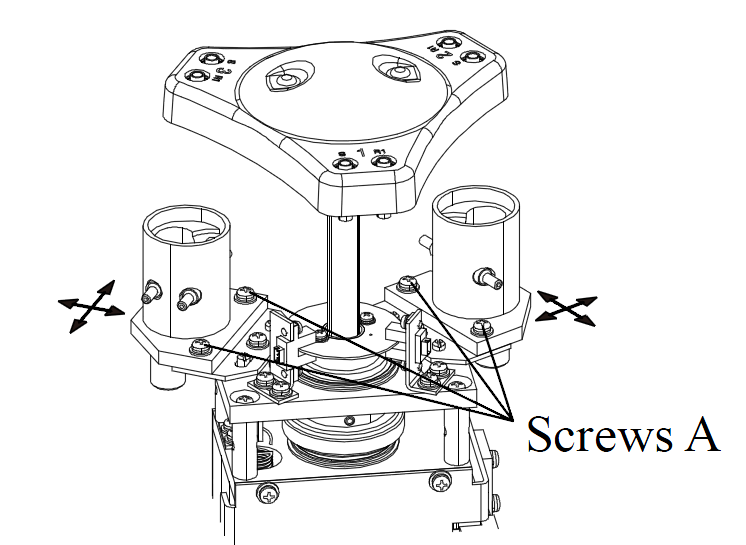
ISE单元主机上面板里装有电极、混合杯、两个蠕动泵,一个夹断阀和一个电磁阀,还有废液排空池。单独电磁阀很小,是参比液供给阀,这个阀很容易出现问题,导致参比液管路存在气泡或其栓,从而造成电解质结果为0,校准不过等故障,处理无效只有更换。
混合杯需要经常清理,很脏。而混合杯到电极和夹断阀的管道需要经常清洁或更换,最脏的部分都在这里。泵管是耗材,经常需要更换。电极也是,到了寿命或测试次数,不换都难。
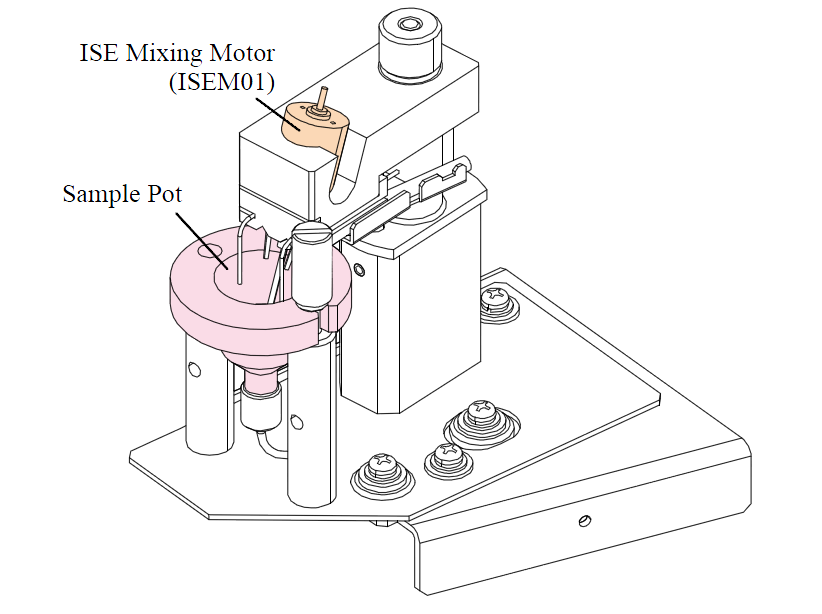
上图红色的是混合杯,橙色的搅拌马达
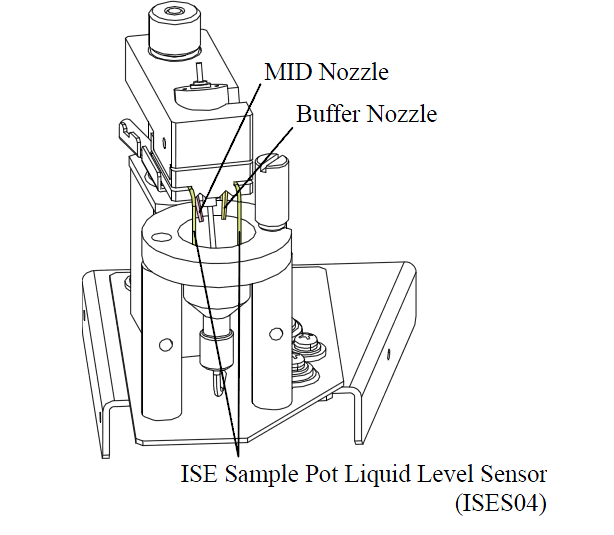
上图绿色的两个钢管是中标液和缓冲液的喷嘴。另外另个中间没有着色的钢针是溢流探测传感器。
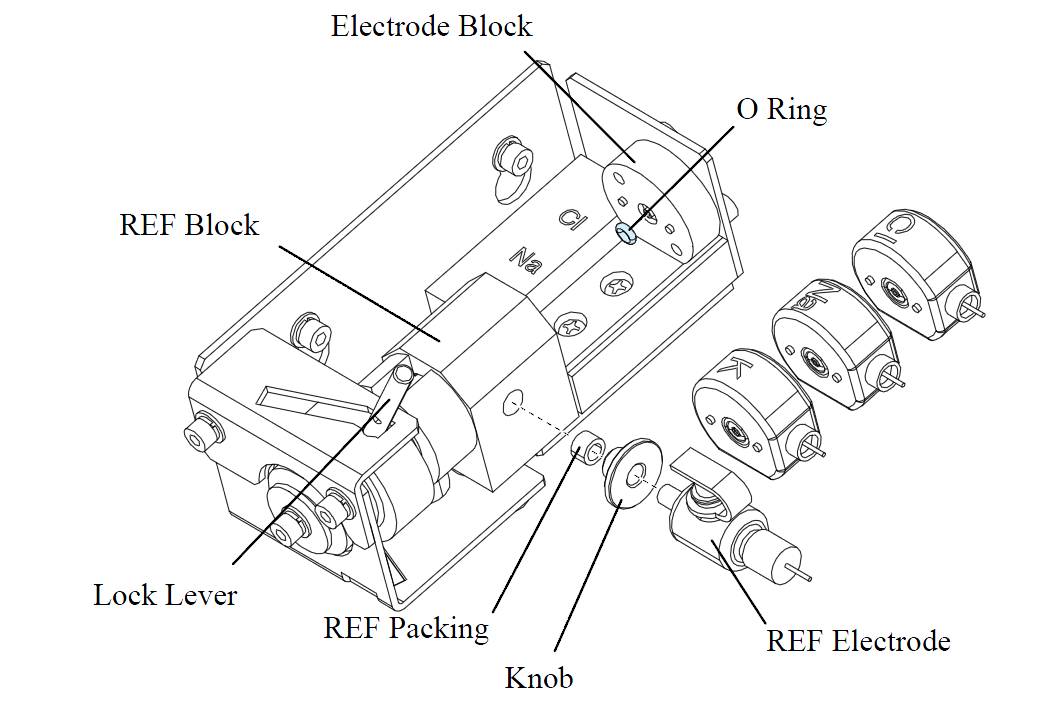
电极室依次装有CL、NA、K电极,三个电极两端都有密封圈,还有横向安装的参比电极,整个电极室由锁紧装置卡住,放置电极出现间隙。
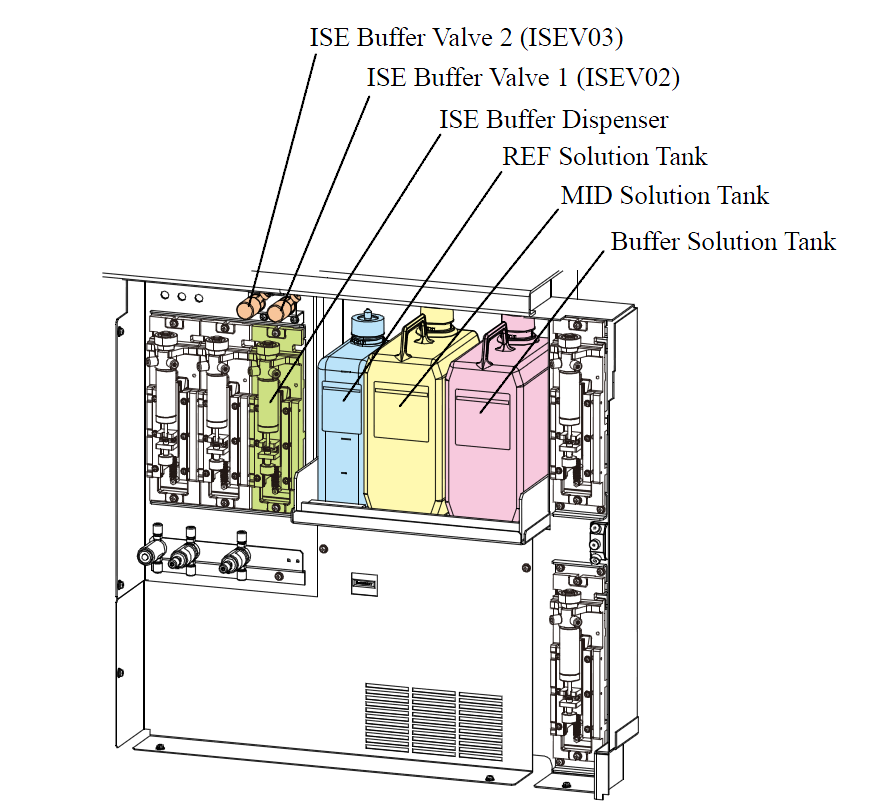
在主机前仓增加两个电磁阀一个缓冲液注射器。还有三种试剂:参比液、中标液和缓冲液。
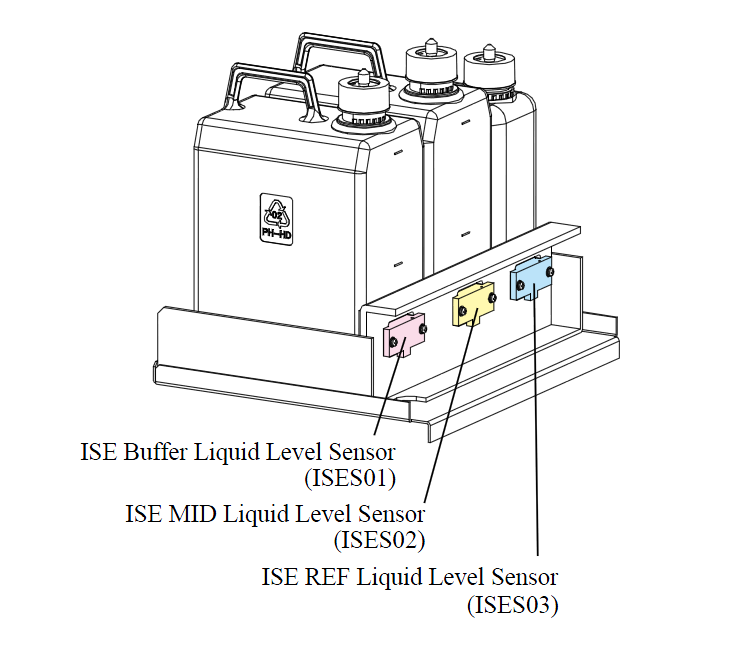
三种试剂都带有液面探测装置。
动作流程不作介绍,详情看管路图介绍。
ISE虽然一大堆零碎,但能调整的地方不多。
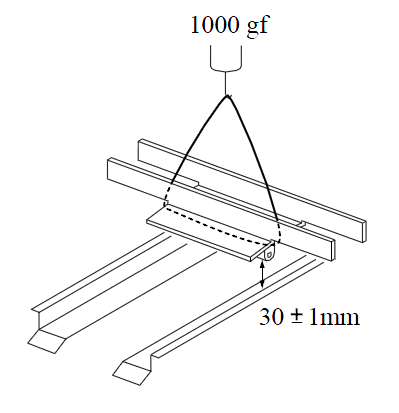
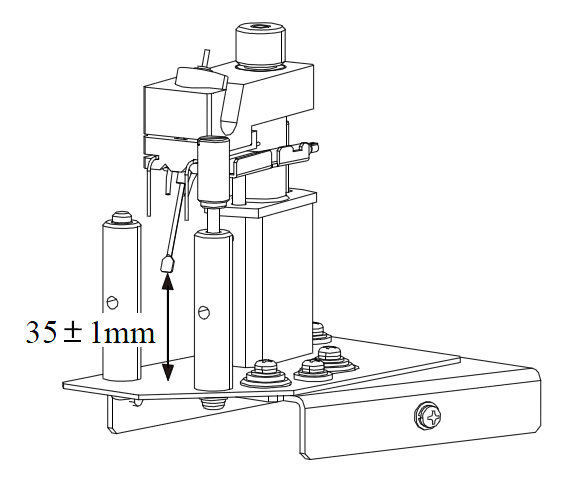
搅拌棒高度检查调整步骤:
取下混匀杯,暴露出搅拌棒。搅拌棒下端离基板的距离是35±1mm,否则调整搅拌臂的高度。
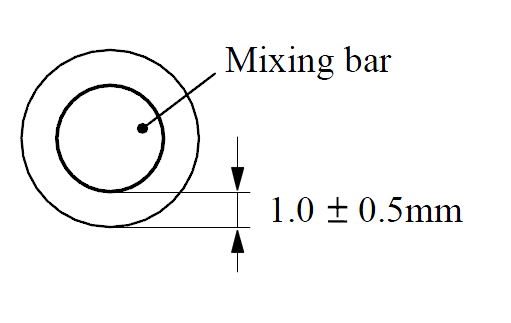
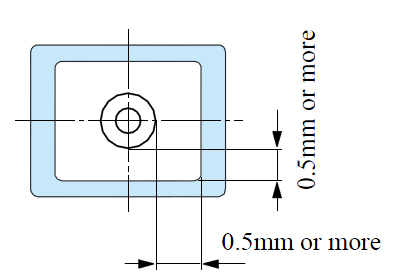
搅拌棒在混合杯位置的检查调整步骤:
观察搅拌棒在混合杯的位置,应该处于正中心偏前的区域,否则调整搅拌臂。
 |
|
至此,AU680的结构图解与调整方法和步骤基本上全部说完,没落下什么。 |

 |
体会网
(
陕ICP备05007619号 )
|
体会网
(
陕ICP备05007619号 )